

- Методологические основы решения задачи ориентации в среде гснс
- Compass
- Galileo
- Глобальная навигационная спутниковая система
- Глонасс
- Дополнительные функции навигационных устройств
- Ключевые параметры навигационных приемников
- Навигационное сообщение
- Независимый формат обмена навигационными данными (rinex)
- Перечень спутниковых навигационных систем различных стран мира
- Поддержка гнсс
- Портал
- Рд 52.04.567-2003 положение о государственной наблюдательной сети (с изменением n 1) от 01 января 2003 —
Методологические основы решения задачи ориентации в среде гснс
МЕТОДОЛОГИЧЕСКИЕ ОСНОВЫ РЕШЕНИЯ ЗАДАЧИ ОРИЕНТАЦИИ В СРЕДЕ ГСНС В.В.Серегин, В.И. Ющенко
Обобщаются результаты исследований проблемы определения ориентации подвижного объекта по информации от спутниковых навигационных систем, опубликованные в периодической печати. Сравниваются результаты использования фазовых и частотных измерений. Даются рекомендации по их совместной обработке с целью повышения эффективности получаемой информации.
Введение
Современное направление развития систем ориентации и навигации можно характеризовать все более проникающим объединением инерциальных методов и технологий навигационных спутников. В области инерциальных чувствительных элементов устойчивая тенденция состоит в использовании малогабаритных, сравнительно дешевых измерителей [1]. Такие элементы, как известно, относятся к среднему, а чаще низкому классу точности. Построение систем ориентации и навигации с применением таких инерциальных измерительных модулей возможно [2] только на основе комплекси-рования вырабатываемой ими информации с информацией от других типов измерителей. В настоящее время основным и наиболее точным источником такой информации признаны глобальные спутниковые навигационные системы (ГСНС) типа GPS и ГЛОНАСС.
Традиционным можно считать использование информации о координатах объекта, полученной от ГСНС, при комплексной обработке навигационной информации. В современных интегрированных инерциально-спутниковых системах навигации в алгоритмы обработки также вводят информацию о скорости объекта, вычисленной в аппаратуре потребителя ГСНС. В журнальных статьях и в материалах научных конференций эти проблемы освещены достаточно подробно, (см., например.[3]). В аппаратуре потребителя ГСНС географические координаты и составляющие скорости объекта вычисляются путем обработки кодовых сигналов, принимаемых от навигационных спутников.
Однако в связи с повышением качества работы ГСНС и совершенствованием аппаратуры потребителя появилась возможность получать дополнительную информацию за счет обработки несущей частоты сигналов. В частности, измерение фазы несущей частоты позволяет существенно повысить точность измерения псевдодальностей и, как следствие, вычисленных координат. Качественно новым направлением использования информации, содержащейся в несущей частоте, является определение ориентации объекта [4, 5]. При включении этой информации в алгоритм начальной выставки инерци-альной навигационной системы (ИНС) возможно существенное уменьшение времени готовности системы, особенно на подвижном объекте. Кроме того, появляется возможность непрерывной калибровки инерциальных измерительных модулей в реальных условиях. Особенно актуально комплексирование этих данных об ориентации объекта для решения задачи курсоуказания в системах, в которых не может быть реализован режим гирокомпасирования из-за низкой точности инерциальных чувствительных элементов.
В настоящее время уже имеются опытные разработки интегрированных систем, в которых используется информация об угловом положении объекта, полученная от много антенной аппаратуры потребителя ГСНС [3]. Проведенные испытания показали перспективность положенных в их основу решений. Однако теоретические основы определения ориентации объекта по информации, содержащейся в несущей частоте, проработаны недостаточно полно и не позволяют эффективно использовать ее, особенно на
объектах с высокой динамикой угловых движений. Поэтому необходимо обобщить уже имеющиеся результаты исследований этой проблемы, наметить перспективные направления развития и дать рекомендации по наиболее эффективному комплексированию различных видов информации об угловом движении объекта.
Информационная среда
Основными параметрами несущей частоты сигналов, принимаемых от навигационных спутников, являются частота и фаза колебаний. При этом частота отличается от известной частоты излучаемого сигнала на величину доплеровского сдвига, обусловленного относительным перемещением объекта и спутника. Фаза колебаний определяется псевдодальностью между ними. Эти параметры и определяют информационную среду, в которой решается задача определения ориентации объекта.
Суть интерферометрического принципа, реализуемого при использовании фазы несущей частоты, состоит в измерении разности фаз сигналов, принимаемых от спутника на разнесенные антенны (см. рис.1). В дальнейшем для краткости будем называть это фазовым методом.
Дольная компонента
Целочисленная компонента
Несущая волна
Опорная антенна
Вектор базы Ведомая
_ „ антенна
s (3×1)
Орт направления на спутник
Рис. 1. Фазовый метод
Из рис.1 видно, что полная разность фаз сигналов, принимаемых опорной и ведомой антеннами, может быть представлена в виде
Ф. = Дф. Х-кг] 8. , г = 1кт,у = 1кп (1)
где Дф. — дольная часть длины волны, X — длина несущей волны, к. — целое число волн, 8. — ошибка измерения, г — номер вектора базы,. — номер навигационного спутника. В единицах длины эта разность фаз может быть выражена также через модуль вектора базы Ьг
Ф ,, =
b’
cos р , , (2)
где в, — угол между ‘-м вектором базы и ортом направления от антенны на ,-ый спутник. Из сравнения (1) и (2) вытекает, что по величине разности фаз ф, можно вычислить ориентацию вектора базы в плоскости, проходящей через базу антенн и местоположение спутника, относительно орта S J . Проблема состоит в том, что непосредственно может быть измерена только дольная часть фазы. Присутствие в (1) целого числа
длин волн приводит к неоднозначности фазовых измерений, разрешение которой представляет сложную самостоятельную задачу. В литературе, например, в [6], предложены различные методы исключения этой неоднозначности, и здесь они рассматриваться не будут.
Как отмечено выше, вторым информационным параметром является доплеров-ский сдвиг частоты. Результаты измерения разности частот сигналов, принимаемых опорной и ведомой антеннами (см. рис. 2), дают разность доплеровских сдвигов частот в каждой антенне и могут быть использованы для решения задачи ориентации. Будем называть этот подход частотным методом.
/
ь,-
Рис. 2. Частотный метод
На рис.2 изображена плоскость, проходящая через вектор базы Ьг и навигационный спутник ^, и приняты обозначения: Ло, А1 — опорная и ведомая антенны соответственно, У0,У1 — скорости относительного движения фазовых центров антенн (ФЦА) и спутника, ш — скорость поворота ведомой антенны относительно опорной из-за углового движения объекта, Уг — линейная скорость ФЦА антенны Л1, обусловленная этим
движением, — орт направления из центра базы антенн на спутник.
В [7] получено соотношение для разности доплеровских частот р и ¥0 , принимаемых антеннами А1 и А0, в виде
рг = р — р = / 1 г! М ‘о J s
Vг ■ *1
шг1 х Ь’
и
X
бш а.
г1
(3)
где /ц, X — частота и длина волны сигнала, излучаемого навигационным спутником, ш^ -проекция вектора угловой скорости объекта на нормаль к плоскости, содержащей вектора Ьг и , с — скорость распространения электромагнитных колебаний. Непосредственно из (3) видно, что, измерив разность частот р!, можно вычислить угловое положение вектора базы относительно орта направления на данный навигационный спутник. При наличии избыточной информации, получаемой от нескольких спутников, по разности доплеровских частот можно вычислить, кроме угла, также угловую скорость объекта. Ограничением на применение частотного метода является требование, чтобы угловая скорость объекта была отлична от нулевого значения.
Определение ориентации
В задачах управления и/или стабилизации объекта его ориентация определяется относительно некоторой базовой системы координат (СК), в качестве которой часто
с
используется географическая СК ЫИЕ: ось N направлена по полуденной линии на север, ось И совпадает с внешней нормалью к поверхности референц-эллипсоида. Ориентация объекта задается взаимным расположением базовой СК и связанной СК ХУ2: ось X — по продольной оси объекта, ось Z — по нормали к продольной оси вверх. Начала этих СК можно совместить, например, с фазовым центром опорной антенны, что не снижает общности решения задачи.
После решения в аппаратуре потребителя ГСНС основной навигационной задачи по определению координат объекта, используя также известные координаты данного спутника, можно вычислить направляющие косинусы (составляющие) орта Э1 в базовой СК. Отметим, что важным методологическим фактором в данном случае является возможность определить проекции орта на оси базовой СК без привлечения дополнительной внешней информации, а используя только информацию, полученную в среде ГСНС. Очевидно, что для того, чтобы найти величины проекций вектора базы Ьг на оси базовой СК, необходимо располагать его ориентацией относительно направлений на два навигационных спутника и иметь априори известную длину базы антенн, а именно:
э1 = Ь1 • Ь’ • Э1 Ь
1 «И
-,1 1
ЬИ • ЭИ
1 1
Ь „
Ьг • Р 1 = Ь
Ьг • Ьг )2 (ЬИ)2 Ь)
Е ЛЕ’
ЬЕ • Эе
1 1.
(4)
где Ь1Б (В=^И,Е — проекции вектора Ь1 на оси географической СК; эБ , э’б (Б=^И,Е -направляющие косинусы соответствующих ортов на те же оси. В том случае, когда можно одновременно наблюдать три навигационных спутника (минимальное число в созвездии, необходимое для решения основной задачи навигации), вместо (4) имеем матричное уравнение
Ьг • э1
Ьг • Э1 1 =
Ьг э1 2
1
г! 2
Э] 1
И
1 2
N
э
-,1 1
2
И
К
ЬИг
ЬЕг
(5)
Компоненты Ь’с (С=Х,У,Т) векторов баз в связанной СК можно считать точно известными. Поэтому после определения компонент ЬгБ (Б=^И,Е) в географической СК задача ориентации решается на основе метода векторного согласования [8]. Суть метода состоит в том, что компоненты вектора Ь , известные или измеренные в двух различных СК, связаны между собой через матрицу преобразования от одной СК к другой. В данном случае имеем
Ь’ Ь1 Ь
= А
Ьг Ьг Ьг
иТ и тт Ст
(6)
где Асб — матрица перехода от географической СК к связанной. Если матрица АСБ параметризована с помощью углов курса К и качки у, то эти углы вычисляются непосредственно по элементам матрицы. Следует иметь в виду, что для однозначного определения матрицы Асб из (6) необходимо располагать как минимум двумя неколлинеар-
ными векторами. При решении задачи ориентации объекта — это два вектора баз антенн, развернутые друг относительно друга на некоторый угол.
В [7] приведены результаты исследований, согласно которым измерения допле-ровского сдвига частот несущего сигнала позволяют определять как углы ориентации. так и угловые скорости объекта. Для этого достаточно методом наименьших квадратов (МНК) решить векторно-матричное уравнение, составленное для трехбазовой антенной системы,
Е
Е
Е
т
т
||А,
ю ю
(АЛСБ )т • Л,
СБ
V} V2 V3 • ь1 ь2 ь
• ЛСБ — ю
(7)
где ю — кососимметрическая матрица из составляющих вектора ю в географической СК, Аю, АЛсб — приращения элементов вычисляемых матриц. Система 9 скалярных
уравнений, полученных из (7), решается методом последовательных приближений.
В [9] было показано, что по результатам частотных измерений можно непосредственно вычислить компоненты векторов баз антенн в географической СК. Для этого необходимо решить матричное уравнение, полученное для трех ортогональных векторов баз, с учетом наличия в нем избыточной информации:
ьБ 1Н1 0 0
ьБ 0 |ю| 0
ьБ 0 0 ||юЦ
0 (ь2) ит 0
0 (ь5) 0 (ь’Г
0 0 (ь5) (ь2)
0 (ь’Г 0 0
0 0 (ь2) 0
0 0 0 (ь5)
0 (1) ( ) (3)
V1 г -ю хь1
V2 г -ю хь2
V3 г -ю х ь3
Аю С — 12 (ь1 )т • ь2
АЬ 1 С- 13 (ь1 )т • ь3
АЬ 2 С- 23 (ь2)т •ь3
аь 3 С11 — С- 22 С- 33 (ь1 )т • ь1 (ь2) • ь2 (ь3) • ь3
(8)
С12з-(ь1) •(ь2 хЬ
где Аь1 (1 = 1,2,3), Аю — приращения вычисляемых элементов матрицы; Сц (/,7=1,2,3) -константы, характеризующие вектора баз и их взаимное положение; ё1 (г = 1,2,3) — векторы, взаимные к векторам баз антенн в их проекциях на оси географической СК. Далее, используя известные направляющие косинусы орта , можно пересчитать векторы баз на направление от объекта на спутник и выделить целое число длин волн, содержащееся в модуле вектора. Это дает возможность исключить неоднозначность фазовых измерений за одну измерительную эпоху, что имеет большое значение для определения ориентации объектов с высокой динамикой угловых движений.
Сравнение методов. Использование информации, полученной фазовым или частотным методом, для определения ориентации объекта имеет как преимущества, так и недостатки в сравнении друг с другом. Для наглядности эти свойства сведены в табл. 1. Из их анализа следует вывод, что наилучшие результаты будут при совместном использовании информации, полученной этими двумя методами.
Совместная обработка фазовых и частотных измерений. Каждый из методов преобразования информации несущей волны обладает как положительными качествами, так и отрицательными. Для повышения эффективности использования информации естественно применить процедуру их совместной обработки. Возможные варианты такой процедуры показаны на рис. 3 и 4. Различаются они, в основном, алгоритмом обработки результатов измерения доплеровских сдвигов частоты.
В первом из вариантов (см. рис.3) линейная скорость V г ведомой антенны, полученная путем обработки разностей доплеровских частот, используется для вычисления ориентации вектора базы относительно орта направления на данный спутник. Спроецировав вектор базы на орт, находим целое число длин волн, содержащееся в этой проекции. При этом для повышения точности вычислений можно применить какой-либо фильтр, выделяющий именно целое число кц. Это решает задачу исключения
-1
3
неоднозначности фазовых измерений. Кроме того, доплеровские частоты, измеренные во всех антеннах, используются в алгоритме вычисления угловых скоростей объекта.
Характеристика
Метод фазовых
измерений
Метод частотных измерений
1
2
3
Источник первичной информации
Вторичная информация
Определяемые параметры
Причина получения неоднозначного решения
Влияние динамики углового движения объекта
Разность фаз несущего сигнала НКА ведомой антенны относительно опорной
Угловое положение базы антенны относительно направления на НКА
Угловая ориентация объекта в географической СК
Неизвестное число целых длин волн в разности псевдодальностей антенн и НКА при единичном измерении
Снижает точность определения ориентации, увеличивает время обработки информации
Разность доплеровских сдвигов частот несущего сигнала НКА, принятого ведомой и опорной антеннами
Разность линейных скоростей ФЦА в проекциях на оси географической СК
Угловые скорости и углы, определяющие ориентацию объекта в географической СК
Сохранение ориентации вектора линейной скорости при одновременном изменении направления векторов ба зы и угловой скорости на противоположное
Повышает точность определения ориентации и угловых скоростей
Таблица 1. Сравнение методов определения ориентации объекта
Рис. 3. Совместная обработка фазовых и частотных измерений. Вариант 1
В другом варианте (см. рис. 4) на основе уравнения (9) в географической СК вычисляются компоненты векторов баз всех антенн и угловые скорости объекта. Затем, как отмечалось выше, необходимо полученные компоненты каждого вектора базы спроецировать на орты направлений на соответствующие спутники и выделить в этих проекциях целое число длин волн. Далее задача определения углов ориентации решает-
ся так же, как в предыдущем случае. Можно предположить, что в данной процедуре вычисление компонент векторов баз будет выполнено с большей точностью за счет привлечения большего объема информации, поступающей от всего созвездия спутников, находящихся в зоне видимости объекта.
Рис. 4. Рис. 3. Совместная обработка фазовых и частотных измерений. Вариант 2
Заключение
Подводя итоги изложенного, можно сделать следующие выводы.
1. Информационная среда глобальных спутниковых навигационных систем ГЛОНАСС и NAVSTAR содержит координатно-временные, фазовые и частотные параметры необходимые и достаточные для автономного решения задачи определения движения объекта по углам и угловым скоростям.
2. Применение метода векторного согласования обеспечивает вычисление взаимной ориентации связанной и географической систем координат по минимальному составу рабочего созвездия навигационных спутников при наличии на объекте много антенной аппаратуры потребителя, образующей систему из двух неколлинеарных векторов баз, при условии априорно известных длинах баз и ориентации векторов относительно связанной системы координат.
3. Комплексная обработка фазовой и частотной информации, содержащейся в несущих колебаниях, дает возможность оптимизировать определение углов и угловых скоростей для подвижных объектов без ограничений на динамику их углового движения. Разработка оптимальной процедуры требует дальнейших исследований характеристик погрешностей обрабатываемой информации.
Литература
1. Ландау Б.Е. Современные тенденции развития чувствительных элементов инер-циальных навигационных систем. // Навигация и управление движением. Сб. докладов I НТК молодых ученых. СПб.: ЦНИИ «Электроприбор», 1999. С. 8797.
2. Пешехонов В.Г. Проблемы и перспективы современной гироскопии. // Изв. вузов. Приборостроение. 2000. Т. 43. № 1-2. С. 48-56.
3. Интегрированные инерциально-спутниковые системы навигации. Сб. статей и докладов/Под общей ред. акад.РАН В.Г.Пешехонова. СПб.: ГНЦ РФ-ЦНИИ «Электроприбор», 2001. 234 с.
4. Использование системы NAVSTAR для определения угловой ориентации объектов./ В.Н. Абросимов, В.И. Алексеева, Ю.А. Гребенко и др. // Зарубежная радиоэлектроника. 1989. № 1. С. 46-53.
5. Lachapelle G. Attitude Determination. // AGARD Lecture Series 207 -NATO.1996.P.10.
6. Степанов О.А., Кошаев Д.А. Исследование методов решения задачи ориентации с использованием спутниковых систем // Гироскопия и навигация. 1999, № 2. С.30-55.
7. Серегин В.В., Ющенко В.И. Алгоритмы обработки информации, получаемой многоантенной аппаратурой потребителей GPS. // Гироскопия и навигация. 1999. №3. С. 93-100.
8. Липтон А. Выставка инерциальных систем на подвижном основании. М.: Наука, 1971. 167 с.
9. Серегин В.В., Ющенко В.И. Одномоментное разрешение неоднозначности фазовых измерений при определении ориентации подвижного объекта. // Гироскопия и навигация. 2004. №4. С. 88.
Compass

Это следующая ступень развития китайской региональной навигационной системы Beidou, которая была введена в эксплуатацию после запуска 10 спутников в конце 2022 года. Сейчас она обеспечивает покрытие в границах Азии и Тихоокеанского региона, но, как ожидается, к 2020 году система станет глобальной.
Сравнение орбит спутниковых навигационных систем GPS, ГЛОНАСС, Galileo и Compass (средняя околоземная орбита — MEO) с орбитами Международной космической станции (МКС), телескопа Хаббл и серии спутников Иридиум (Iridium) на низкой орбите, а также геостационарной орбиты и номинального размера Земли.
Galileo

Галилео — совместный проект Европейского союза и Европейского космического агентства, анонсированный в 2002 году. Изначально рассчитывали, что уже в 2022 году в рамках этой системы на средней околоземной орбите будут работать 30 спутников. Но этот план не был реализован.
Глобальная навигационная спутниковая система
ГНСС относится к группе спутников, которые ретранслируют сигналы из космоса для передачи данных о местоположении и времени на приемники ГНСС. Спутниковые навигационные системы различных стран функционируют в рамках ГНСС. В настоящее время, GPS стал настолько популярным, что люди ошибочно принимают каждую спутниковую систему за GPS.
Глонасс

Сегодня на орбите работают 24 спутника ГЛОНАСС, они охватывают навигационным сигналом весь земной шар.
Новейшие потребительские устройства используют GPS и ГЛОНАСС как взаимодополняющие системы, подключаясь к ближайшим найденным спутникам, это значительно увеличивает скорость и точность их работы.
Пример: aвтомобильное GPS/ГЛОНАСС-навигационно-связное устройство на базе ОС Android, разработанное командой Promwad по заказу российского конструкторского бюро. Реализована поддержка GSM/GPRS/3G. Устройство автоматически обновляет информацию о дорожной обстановке в режиме реального времени и предлагает водителю оптимальный маршрут с учётом загруженности дорог.
Сейчас на стадии разработки находятся еще две спутниковые системы: европейская Galileo и китайская Compass.
Дополнительные функции навигационных устройств
Счисление пути
. На основе информации о направлении движения и пройденном пути (предоставляется дополнительными датчиками) приемник может рассчитывать свои координаты при отсутствии сигналов от спутников (например, в туннелях, на подземных стоянках и в плотной городской застройке).
Некоторые модули имеют возможность напрямую подключать флэш-память (например, по SPI) к модулю для
записи трека
c необходимой периодичностью. Эта функция позволяет отказаться от использования отдельного микроконтроллера, либо она может быть полезной для минимизации энергопотребления (т.е. система на кристалле может находиться в состоянии сна).
На этом поверхностный обзор технологий глобальной спутниковой навигации завершен. Спасибо за внимание. Примеры реализованных проектов на базе этих ГЛОНАСС и GPS можно посмотреть на странице
Ключевые параметры навигационных приемников
Прежде чем навигационный приемник сможет выдавать информацию о местоположении, он должен обладать тремя наборами данных:
- Сигналы от спутников
- Альманах — информация о приблизительных параметрах орбит всех спутников, а также данные для калибровки часов и характеристики ионосферы
- Эфемериды — точные параметров орбит и часов каждого спутника
Характеристика
TTFF
показывает сколько времени требуется приемнику на поиск сигналов от спутников и определение местоположения. Если приёмник новый, или был выключен на протяжении длительного периода, или был перевезен на большое расстояние с момента последнего включения, время до получения набора необходимых данных и определения места увеличивается.
Производители приемников используют различные методы уменьшения TTFF, включая скачивание и сохранения альманаха и эфемерид по беспроводным сетям передачи данных (т.н. метод Assisted GPS или A-GPS), это быстрее чем извлечение этих данных из сигналов ГНСС.
Холодный старт
описывает ситуацию, когда приемнику нужно получение всей информации для определения места. Это может занять до 12 минут.
Теплый старт
описывает ситуацию, когда у приемника есть почти вся необходимая информация в памяти, и он определит место в течении минуты.
Одним из ключевых параметров навигационных модулей в мобильных устройствах является энергопотребление. В зависимости от режима работы модуль потребляет различное количество энергии. Фаза поиска спутников (TTFF) характеризуется большим, а слежение меньшим энергопотреблением.
Как правило, все модули выдают данные по текстовому протоколу
NMEA-0183
, но кроме указанного текстового протокола каждый производитель имеет свой собственный двоичный протокол (Binary), который позволяет изменять конфигурацию модуля под конкретное использование либо получать доступ к дополнительному функционалу, а также доступ к сырым измерениям.
Двоичный протокол удобен для использования на микроконтроллерах, т.к. при этом нет необходимости выполнять преобразование из текста в двоичные данные, тем самым экономя программную память путем исключения библиотеки работы со строками и времени на преобразование.
Стандарт NMEA-2000
— это развитие протокола NMEA-0183. В качестве физического уровня в NMEA-2000 используется CAN-шина, которая была выбрана в виду большей защищенности по сравнению с RS-232. С точки зрения протокола передачи данныхNMEA-2000 существенно отличается от своего предшественника, т.к. использует двоичный протокол, базирующийся на стандарте SAE J1939.
Частота обновления данных о местоположении и скорости всех модулей составляет 1 Гц, но при необходимости ее можно поднять до 5 или 10 Гц.
В зависимости от области применения модуль можно сконфигурировать под определенные
динамические характеристики
, которые он должен отслеживать (например, максимальное ускорение объекта). Это позволяет использовать оптимальный алгоритм и улучшать качество измерений.
Для выполнения навигационной задачи модуль должен одновременно принимать сигналы от нескольких спутников, т.е. иметь несколько
приемных каналов
. На сегодняшний день это число лежит в диапазоне от 12 до 88.
Точность определения местоположения по GPS составляет в среднем 15 м, она обусловлена используемым неточным сигналом, влиянием атмосферы на распространение радиосигнала, качеством кварцевых генераторов в приемниках и пр. Но с помощью корректирующих методов возможно улучшить точность определения местоположения. Эта технология называется
Differential GPS
. Существует два метода коррекции: наземный и спутниковый DGPS.
В наземных методах коррекции наземные станции дифференциальных поправок постоянно сверяют свое заведомо известное местоположение и сигналы от навигационных спутников. На базе этой информации вычисляются корректирующие величины, которые могут быть переданы с помощью УКВ- или ДВ-передатчика на мобильные DGPS-приемники в формате
RTCM
. На основании полученной информации потребитель может корректировать процесс определения собственного местоположения. Точность этого метода составляет 1—3 метра и зависит от расстояния до передатчика корректирующей информации и качества сигнала.
Спутниковые методы, такие как система
WAAS
(Wide Area Augmentation System), доступная в Северной Америке, и система
EGNOS
(European Geostationary Navigation Overlay System), доступная в Европе, шлют корректирующие данные с геостационарных спутников, таким образом достигается б
о
льшая область приема, чем при наземных методах.
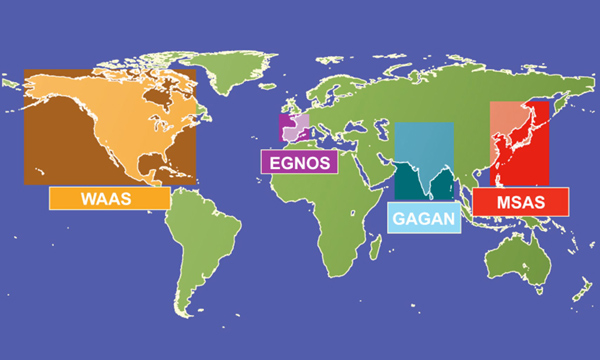
Спутниковые системы дифференциальной коррекции (SBAS — Space Based Augmentation Systems) позволяют улучшить точность, надежность и доступность навигационной системы за счет интеграции внешних данных в процессе расчета
Демонстрация принципа работы системы WAAS (Wide Area Augmentation System) на территории СШАОдним из основных параметров, влияющих на точность определения местоположения и стабильность приема является чувствительность. Она, как правило, определяется качеством малошумящего усилителя на входе приемника и сложностью реализованных алгоритмов цифровой обработки.
Типовые значения современных приемников лежат в диапазоне 143 дБм для поиска и 160 дБм для слежения.Кроме определения местоположения ГНСС предоставляют информацию о точном времени. Как правило, все приемники имеют выход PPS (pulse per second, импульсов в секунду) — секундная метка (1 Гц), которая точно синхронизирована с временной шкалой UTC.
Навигационное сообщение
Навигационное сообщение — это сообщение, отправленное спутником пользователю после получения данных из управляющего сегмента. Для определения положения и скорости спутников, имеются три набора данных, которые передаются в виде навигационного сообщения, а именно: данные альманаха, транслируемые эфемериды и точные эфемериды («эфемерид» — это положение небесного тела в заданный период времени). Сообщения, передаваемые спутником, имеют формат RINEX, представляющий собой формат обмена данными для спутниковых систем.
Независимый формат обмена навигационными данными (rinex)
Первое предложение по независимому формату обмена информацией (RINEX) было разработано в Бернском Астрономическом институте, с целью упрощения обмена собранными данными GPS. С момента его разработки, формат RINEX претерпел множество изменений и постоянно модифицируется.
RINEX имеет три версии — RINEX version 1, RINEX version 2 и RINEX version 3, последняя из которых обновилась до RINEX 3.03.Различные спутниковые системы посылают разные закодированные навигационные сообщения, поэтому для их расшифровки нужно знать, как дифференцировать и идентифицировать данное сообщение и использовать определенные алгоритмы для их декодирования (используются обычные понятия структуры данных).
Теперь вернемся к нашему вопросу о Google Maps, который использует GPS в качестве своей навигационной системы. Пользователь посылает сигналы на спутник через свое устройство с запросом направления к определенному месту назначения. Затем эти сигналы принимаются спутником и, используя спутниковые снимки, спутник посылает навигационное сообщение на устройство пользователя в зашифрованном формате. Затем это сообщение декодируется и используется приложением для того, чтобы привести нас к желаемому месту назначения.
Спутниковая навигация является важнейшей спутниковой системой, имеющая как коммерческое, так и стратегическое применение. Это имеет большое значение, когда речь заходит о национальной безопасности, т.к. они могут помочь в поиске враждебных сторон. Видя, насколько функциональны такие системы, многие страны постепенно разрабатывают свои собственные, чтобы избежать ненужной иностранной зависимости.
Перечень спутниковых навигационных систем различных стран мира
- Система глобального позиционирования, широко известная как GPS, является спутниковой навигационной системой США. GPS функционирует с 1978 года и предоставляет пользователям услуги позиционирования, навигации и синхронизации. Он состоит из трех сегментов, а именно: космического сегмента, управляющего сегмента и пользовательского сегмента.
- Индийская региональная спутниковая система (IRNSS), широко известная как NavIc, является независимой региональной навигационной спутниковой системой. Она предназначена, главным образом, для индийских пользователей и предоставляет им точные информационные услуги о местоположении. Она также обслуживает тех, кто находится в радиусе 1500 км от Индийского субконтинента. Систеёма начала функционировать 1 июля 2022 года.
- Квазизенитная спутниковая система (QZSS) — это японская спутниковая система, состоящая, в основном, из спутников на квазизенитных орбитах (QZO). Часто называемая «японской GPS», QZSS появилась на свет 1 ноября 2022 г.
- Galileo — это спутниковая система Европейского Союза, впервые запущенная в 2022 г. Она обеспечивает точную информацию о времени и местоположении для европейских служб и пользователей.
- BeiDou — это китайская спутниковая система, первый запуск которой состоялся 30 октября 2000 г.
- ГЛОНАСС (глобальная спутниковая система) впервые была запущена 12 октября 1982 г и принадлежит России.
Поддержка гнсс
Поддержка технологи глобальных навигационных спутниковых систем (ГНСС) в электронных устройствах реализуется на базе навигационных приемников, которые могут быть выполнены в различных вариантах:
Навигационный модуль подключается к микроконтроллеру или системе на кристалле по интерфейсу UART/RS-232 или USB.
Портал
ПОРТАЛ ПО ГРАНТОВЫМ ПРОГРАММАМ ПСПИ НА 2021
Уважаемые заявители!
По ссылкам ниже можете перейти на электронный портал по каждой грантовой программе!
Прием заявок по грантовым программам проекта «Стимулирование продуктивных инноваций» осуществляется в электронном формате по ссылкам, указанным ниже:
- «Гранты для старших научных сотрудников/гранты для младших научных сотрудников»
https://astanahub.com/account/service/GSNS/request/33/create/
- «Консорциумы производственного сектора I: Центры компетенции»
https://astanahub.com/account/service/KPSI/request/15/create/
- «Консорциумы производственного сектора II»
https://astanahub.com/account/service/KPSII/request/16/create/
Прием заявок через Портал начинается 23 августа 2021 года и заканчивается 23 сентября 2021 года в 18 часов 00 минут по времени Нур-Султан. По всем вопросам Вы можете обращаться по телефону 77771498036.
О ПОРТАЛЕ
Портал Проекта – это интегрированная электронная система по приему заявок для участия в грантовых программах, которая позволяет членам МСНК и сотрудникам ГУП работать с заявками на гранты в режиме онлайн, а также осуществлять мониторинг проектов, оценивать ход реализации и достижение результатов.
КАК РАБОТАЕТ ПОРТАЛ
У каждого участника Проекта: членов МСНК, консультантов ГУП, грантополучателей, участников консорциумов и кандидатов на гранты есть личный кабинет, позволяющий управлять бизнес-процессами и фиксировать время подачи заявок, а также корректировки со стороны консультантов ГУП и членов МСНК.
Портал обеспечивает автоматическую фиксацию данных и способствует транспарентной работе Проекта.
Поскольку Портал является пилотным механизмом для проверки новых способов управления инновационными процессами, к концу Проекта он будет полностью готов, а структура и функции Портала будут доработаны с учетом опыта реализации.
В дальнейшем данный механизм будет использован в работе структур, ответственных за коммерциализацию науки и распределении государственных грантов.
Согласно пункту 2 Статьи 2 «Законодательство Республики Казахстан об информатизации» Закона Республики Казахстан от 24 ноября 2022 года № 418-V «Об информатизации», если международным договором, ратифицированным Республикой Казахстан, установлены иные правила, чем те, которые содержатся в вышеупомянутом Законе, то применяются правила международного договора.
Рд 52.04.567-2003 положение о государственной наблюдательной сети (с изменением n 1) от 01 января 2003 —
РД 52.04.567-2003
Дата введения 2003-07-01
1 РАЗРАБОТАН Главной геофизической обсерваторией им. А.И.Воейкова (ГГО)
2 РАЗРАБОТЧИКИ В.И.Кондратюк (руководитель разработки), Т.П.Грибова, Т.П.Светлова, А.В.Павлов (ГГО); Н.А.Зайцева (ЦАО); Н.Н.Бобровицкая, О.Б.Воскресенский (ГГИ); В.А.Романцов (ААНИИ); А.Д.Пасечнюк, В.М.Мокиевский (ВНИИСХМ); С.В.Победоносцев, А.Н.Коршенко (ГОИН); В.В.Шлычкова (ГХИ); В.А.Сурнин (НПО «Тайфун»)
3 ВНЕСЕН Управлением работ федерального назначения в области гидрометеорологии, государственной наблюдательной сети, Арктики и Антарктики (УРСА) Росгидромета
4 УТВЕРЖДЕН Федеральной службой России по гидрометеорологии и мониторингу окружающей среды (Росгидромет)
5 ЗАРЕГИСТРИРОВАН Центральным конструкторским бюро гидрометеорологического приборостроения (ЦКБ ГМП) за N 52.04.567-2003
6 ВЗАМЕН РД 52.04.567-96. Положение о наземной сети наблюдений Росгидромета. РД 52.04.107-86. Наставление гидрометеорологическим станциям и постам. Вып.1, в части разделов 2 и 3
ВНЕСЕНО Изменение N 1, утвержденое Руководителем Росгидромета 02.12.2008 и введеное в действие с 01.01.2009
Изменение N 1 внесено изготовителем базы данных
Настоящее положение устанавливает организационные основы построения государственной наблюдательной сети, ее структуру и порядок открытия, переноса и закрытия наблюдательных подразделений.
Настоящее положение предназначено для специалистов специально уполномоченного органа исполнительной власти в области гидрометеорологии и смежных с ней областях (Росгидромета), его территориальных органов, организаций наблюдательной сети, научно-исследовательских учреждений (НИУ) при решении вопросов формирования и функционирования государственной наблюдательной сети.
В настоящем положении использованы ссылки на следующие нормативные документы:
ГОСТ 17.1.3.08-82. Охрана природы. Гидросфера. Правила контроля качества морских вод.
ГОСТ 17.2.3.01-86. Охрана природы. Атмосфера. Правила контроля качества воздуха населенных пунктов.
В настоящем положении применяются определения, содержащиеся в законе «О гидрометеорологической службе», других законах Российской Федерации и руководящих документах Росгидромета, с незначительными уточнениями, необходимыми для понимания вопросов, касающихся наблюдательной сети.
Глобальная наблюдательная сеть — наблюдательная сеть, обеспечивающая получение характеристик гидрометеорологических явлений и процессов, происходящих в крупном или планетарном масштабах, для глобальных потребностей.
Глобальная система наблюдений за климатом (ГСНК) — наблюдательная сеть, предназначенная для мониторинга климата, обнаружения его изменений в глобальном масштабе и для других специальных потребностей.
Государственная наблюдательная сеть — наблюдательная сеть федерального органа исполнительной власти в области гидрометеорологии и смежных с ней областях.
Дополнительная наблюдательная сеть — часть государственной наблюдательной сети, предназначенная для учета местных особенностей климатообразующих и других природных факторов и освещения характерных особенностей проявления этих факторов как отличия от фоновых значений.
Информационная продукция — полученная в результате обработки сведений (данных) обобщенная информация, предназначенная для распространения или реализации.
Информация о состоянии окружающей среды, ее загрязнении — сведения (данные), полученные в результате мониторинга окружающей среды, ее загрязнения*.
____________
* Изменением N 1 по всему тексту РД в словосочетании «окружающей природной среды» исключено слово «природной», здесь и далее. — Примечание изготовителя баз данных.
Мониторинг окружающейсреды, ее загрязнения — долгосрочные наблюдения за состоянием окружающей среды, ее загрязнением и происходящими в ней природными явлениями, а также оценка и прогноз состояния окружающей среды, ее загрязнения.
Наблюдательная сеть — система стационарных и подвижных пунктов наблюдений, в том числе постов, станций, лабораторий, центров, бюро, обсерваторий, предназначенных для наблюдений за физическими и химическими процессами, происходящими в окружающей среде, определения ее гидрометеорологических, агрометеорологических и гелиогеофизических характеристик, а также для определения уровня загрязнения атмосферного воздуха, почв, водных объектов, в том числе по гидробиологическим показателям, и околоземного космического пространства.
Наблюдательное подразделение — структурное или обособленное подразделение организации наблюдательной сети, непосредственно выполняющая наблюдения за состоянием окружающей среды, ее загрязнением в одном или нескольких закрепленных стационарных или подвижных пунктах наблюдений, также выполняющая первичную обработку результатов наблюдений и передачу их по утвержденной схеме.
Опасное гидрометеорологическое явление (ОЯ) — гидрометеорологическое или гелиогеофизическое явление, которое по своему значению, интенсивности, продолжительности представляет угрозу безопасности людей, а также может нанести значительный ущерб различным отраслям экономики и населению.
Оперативная информация — информация о фактическом состоянии окружающей среды, ее загрязнении, получаемая в установленные сроки и передаваемая по утвержденной схеме в максимально короткое время с момента ее получения.
Организация наблюдательной сети (ОНС) — некоммерческая с правом юридического лица организация Росгидромета, выполняющая оперативно-производственные (производство наблюдений за гидрометеорологическими процессами и загрязнением окружающей среды, сбор, обработку и передачу информации, техническое и сервисное обслуживание средств измерений, обеспечение потребителей информацией о фактическом и прогнозируемом состоянии окружающей среды, ее загрязнении) и специальные (исполнительные, контрольные) функции в области гидрометеорологии и смежных с ней областях на территории своей деятельности.
Основная наблюдательная сеть — часть государственной наблюдательной сети, репрезентативная относительно общего фона климатообразующих и других природных факторов, обеспечивающая необходимую точность получения фоновых значений гидрометеорологических величин для любой точки территории между пунктами наблюдений.
Подвижной пункт наблюдений за состоянием окружающей среды, ее загрязнением (далее — подвижной пункт наблюдений) — комплекс, включающий в себя платформу (летательный аппарат, судно или иное плавательное средство, другое средство передвижения) с установленными на ней приборами и оборудованием, предназначенными для определения характеристик окружающей среды, ее загрязнения.
Региональная опорная синоптическая сеть (РОСС) — сеть, состоящая из приземных метеорологических и аэрологических станций в пределах региона Всемирной метеорологической организации (ВМО) с установленными программами наблюдений, минимальная с точки зрения потребностей региона и позволяющая странам-членам выполнять их обязанности в рамках Всемирной службы погоды и в областях применения метеорологии.
Реперная (вековая, опорная) сеть пунктов наблюдений — совокупность реперных (вековых, в том числе разрезов в морях и океанах, опорных) пунктов наблюдений для изучения многолетних тенденций изменения климата, агрометеорологического, гидрологического и гидрохимического режима водных объектов суши, морей и океанов, в том числе геофизических процессов, состояния загрязнения окружающей природный среды под влиянием изменений климатических условий и хозяйственной деятельности.
Реперный (вековой, в том числе разрез в море или океане, опорный) пункт наблюдений — стационарный пункт с непрерывным и неограниченно длительным во времени рядом наблюдений, обеспечивающий получение репрезентативных данных из районов большой протяженности.
Стационарный пункт наблюдений за состоянием окружающей среды, ее загрязнением (далее — стационарный пункт наблюдений) — комплекс, включающий в себя земельный участок или часть акватории с установленными на них приборами и оборудованием, предназначенными для определения характеристик окружающей среды, ее загрязнения. К стационарным пунктам наблюдений относят также специально отведенный земельный участок или выделенную часть акватории без установленных на них приборов и оборудования, где проводятся регулярные определения характеристик окружающей среды, ее загрязнения по отдельным видам наблюдений.
Филиал организации наблюдательной сети — обособленное подразделение организации наблюдательной сети, расположенное вне места ее нахождения и осуществляющее часть ее функций.
Юридическое лицо — организация, которая имеет в собственности, хозяйственном ведении или оперативном управлении обособленное имущество и отвечает по своим обязательствам этим имуществом, может от своего имени приобретать и осуществлять имущественные и личные неимущественные права, нести обязанности, быть истцом и ответчиком в суде. Юридическое лицо должно иметь самостоятельный баланс или смету.
(Измененная редакция, Изм. N 1).
4.1 Государственная наблюдательная сеть, согласно возложенным на нее задачам [1], осуществляет:
— проведение регулярных метеорологических, аэрологических, гидрологических, морских гидрометеорологических, агрометеорологических, специальных гидрометеорологических, геофизических и гелиогеофизических наблюдений, а также наблюдений за уровнем загрязнения атмосферного воздуха, почв, поверхностных вод суши и морской среды, атмосферных осадков, снежного покрова, включая радиоактивное загрязнение;
— выполнение наблюдений за опасными гидрометеорологическими, гелиогеофизическими явлениями (ОЯ), высокими и экстремально высокими уровнями загрязнения окружающей среды;
— выполнение первичной обработки результатов всех наблюдений (в том числе анализ проб объектов природной среды);
— передачу в установленном порядке оперативной информации о фактическом состоянии окружающей среды, ее загрязнении, информации об ОЯ, распространение информации общего назначения в соответствии с утвержденным планом и схемой обеспечения;
— обеспечение в установленном порядке органов государственной власти, отраслей экономики, Вооруженных Сил Российской Федерации, а также населения информацией о фактическом состоянии окружающей среды, ее загрязнении, прогнозами и предупреждениями, получаемыми от прогностических органов Росгидромета.
4.2 Государственная наблюдательная сеть является также базой экспериментальных наблюдений, опытной эксплуатации новых средств измерений, апробации новых методик выполнения измерений (наблюдений), проведения производственной практики студентов вузов и учащихся средних специальных учебных заведений.
4.3 Объекты государственной наблюдательной сети, находящиеся в федеральной собственности, обеспечивающие единство технологического процесса проведения наблюдений и подготовки информации, в соответствии с [2], приватизации не подлежат.
5.1 Основу государственной наблюдательной сети составляют стационарные и подвижные пункты наблюдений, в которых выполняются наблюдения одного или нескольких видов по утвержденным программам.
Государственная наблюдательная сеть подразделяется на гидрометеорологическую и сеть наблюдений за уровнем загрязнения окружающей среды.
5.2 В состав гидрометеорологической сети входят следующие наблюдательные сети (по видам наблюдений):
— авиаметеорологическая;

