Глава 16. землеройно-транспортные машины
Общие сведения
Землеройно-транспортными (ЗТМ) называют строительные машины, отделяющие грунт от массива тяговым усилием с последующим его перемещением к месту отсыпки собственным ходом. Основными рабочими операциями ЗТМ являются: послойная разработка грунта, его транспортирование и укладка в основание строительного объекта или отвал, а также планировка земляных поверхностей. В зависимости от вида рабочего органа различают ковшовые (скреперы) и отвальные (бульдозеры, автогрейдеры, грейдер-элеваторы) ЗТМ. Эти машины отличаются простотой конструкцией, универсальностью и высокой производительностью. Их применяют в дорожном строительстве, при рытье котлованов и каналов, возведении насыпей, планировке земляных поверхностей и на других работах.
Рабочий процесс включает два характерных режима: тяговый и транспортный. Исключение составляют грейдер-элеваторы, работающие только в тяговом режиме. На тяговом режиме работают при копании фунта, а на транспортном — при его перемещении к месту отсыпки. Продолжительность тягового режима от общего времени рабочего процесса составляет у скреперов 10… 20 %; у бульдозеров, работающих на послойной разработке грунтов 20…25 %; у бульдозеров и автофейдеров на планировочных работах 75… 80 %. Эффективность тягового режима зависит от способности машины передвигаться без буксования при повышенных сопротивлениях, а транспортного режима — в основном, от скоростных качеств машины, ее проходимости и маневренности. Чаще ЗТМ при работе передвигаются по грунтовым и снежным дорогам, свежесрезанным и рыхлым насыпным грунтам. С повышением влажности фунта условия работы ЗТМ ухудшаются.
Скреперы
Скреперами разрабатывают фунты I и II категории непосредственно, а грунты III и IV категории — после их предварительного разрыхления. Они часто работают в одном комплекте с бульдозерами-рыхлителями, используемыми также в качестве толкачей для повышения силы тяги скреперов. Скреперы не рекомендуется
применять для разработки заболоченных, несвязных переувлажненных фунтов, а также грунтов с большими каменистыми включениями.
| Рис. 16.1. Схемы соединения скреперов с тягачом |
Рабочий цикл скрепера включает копание (отделение фунта от массива и заполнение им ковша), транспортирование фунта в ковше к месту укладки, его отсыпку и возвращение машины на исходную позицию следующего рабочего цикла. Средняя дальность возки фунта скрепером колеблется от 0,3 до 2…3 км при ковшах вместимостью соответственно 5…46 м3. Удельный расход энергии составляет 3,2…6 (кВтч)/м3.
Главным параметром скрепера является вместимость ковша, в соответствии с которой различают скреперы малой (до 4 м3), средней (5… 12 м3) и большой (15 м3 и более) вместимости. Скрепер состоит из тягача и рабочего оборудования, по способу соединения которых различают прицепные (рис. 16.1, а), полуприцепные (рис. 16.1, б) и самоходные (рис. 16.1, в) скреперы. У прицепных скреперов сила тяжести рабочего оборудования вместе с грунтом полностью передается на опорную поверхность через собственные ходовые устройства, а полуприцепные скреперы часть этой нафузки передают на тягач. Обычно прицепные скреперы опираются на две ходовые оси. Существуют также одноосные прицепные скреперы (рис. 16.1, г), у которых центр масс фуженого скрепера расположен над ходовой осью.
Тяговое усилие обеспечивается гусеничным (см. рис. 16.1, а и г), колесным одноосным (см. рис. 16.1, в) или двухосным (см. рис. 16.1, б) тягачом. У скреперов большой вместимости иногда приводными делают также задние колеса, оборудованные встроенным в них электрическим или гидравлическим приводом (мотор-колесо), состоящим из электродвигателя или гидромотора и планетарного редуктора.
Первые колесные скреперы с конной тягой появились в 70-х гг. XVIII в., а в конце XIX в. скреперы были установлены на одноосный ход с металлическими колесами. Для управления положением ковша в рабочем и транспортном режимах использовалась рычажная система. В качестве тягача использовался колесный трактор. В 1910 г. Т. Шмейзером (США) был создан скрепер с ковшом вместимостью 5,4 м3 с гидравлическим управлением ковшом, приводимым в движение от колес трактора. Дальнейшее развитие конструкций скреперов шло по пути совершенствования ковшей и их систем управления. В нашей стране массовое применение получили скреперы на конной тяге при строительстве Туркестано-Сибир-ской дОроги в 20-х гг. прошлого столетия, на Башжелдорстрое и других строительных объектах. В 30-е гг. были созданы скреперы с ковшами вме-
стимостью 5 м3 с гидравлическим управлением и 6 м3 с канатным управлением для работы с тракторами мощностью 48 кВт Челябинского тракторного завода. К концу 50-х гг. вместимость скреперного ковша уже достигла 46 м3 при мощности тягача 440 кВт.
Устройство и принцип работы скрепера рассмотрим на примере его самоходной модели (рис. 16.2, а). Одноосный тягач Рсоеди-нен с рабочим оборудованием сцепным устройством 8ъ виде двух цилиндрических шарниров, позволяющих тягачу поворачиваться и перекашиваться относительно рабочего оборудования. Рабочее оборудование включает в себя ковш /5, опирающийся задней частью на колеса 16, а передней соединенный упряжными шарнирами 14 с боковыми брусьями 13 тяговой рамы, которая своей передней балкой 7опирается на тягач. Ковш ограничен днищем и боковыми стенками, а в задней части — выдвижной стенкой 2, перемещаемой при разгрузке ковша гидроцилиндрами /. В передней части ковш закрывается заслонкой 4 с помощью гидроцилиндров 3.
Для разработки грунта переднюю заслонку приподнимают и, перемещаясь на рабочей скорости, гидроцилиндрами 5 опускают ковш, заглубляя его в грунт. При этом нижний обрез заслонки должен находиться примерно на уровне земли. После заполнения ковша его поднимают, закрывают заслонкой и на транспортной скорости перемещают к месту разгрузки. Чаще скреперы используют для отсыпки грунта в насыпи, для чего после выезда на насыпь ковш опускают, оставляя щель между ножами и поверхностью передвижения, открывают заслонку и, передвигаясь на малой скорости, задней стенкой выталкивают фунт из ковша. При этом
Рис. 16.2. Самоходный скрепер: а — общий вид; б — схема рулевого управления
задние колеса, перекатываясь по свежеотсыпанному фунту, уплотняют его. Поворот тягача относительно ковша осуществляют с помощью гидроцилиндров 6, рабочие полости которых соединены по схеме (рис. 16.2, б), согласно которой поршневая полость каждого гидроцилиндра соединена со штоковой полостью другого гидроцилиндра. Рабочая жидкость поступает от насоса к гидроцилиндрам через гидрораспределитель 18, управляемый винтовой парой 17 от рулевой колонки. Гидроцилиндры шарнирно соединены своими гильзами с хребтовой балкой, а штоками — с тягами 10.
Другие модели скреперов отличаются от описанной способом соединения рабочего оборудования с тягачом, устройством и приводом передней заслонки, конструкцией ковша и его подвеской, обеспечивающей отличные от описанного способы разгрузки: самосвальной — опрокидыванием ковша вперед или назад, полупринудительной — опрокидыванием донной части ковша и задней стенки, способных перемешаться относительно шарниров на боковых стенках, щелевой — путем раздвижки днища и т. п.
Наиболее энергоемкой является операция копания фунта. Ковш заполняется номинальным объемом грунта, равным его геометрической вместимости 6… 15 м3, на длине 9… 15 м при средней толщине стружки 0,09…0,16 м при разработке глин и 0,2…0,35 м при разработке песков. Для заполнения ковша «с шапкой» (выше его геометрической вместимости) длина пути копания увеличивается в среднем на 20 %. Ковш наполняется лучше при движении скрепера под уклон. При постоянной толщине стружки (рис. 16.3, а) и постоянной скорости передвижения тяговая способность скрепера реализуется полностью лишь в конце копания. С целью сокращения длительности этой операции за счет использования резерва тяги в течение всей операции при разработке связных фунтов применяют клиновой способ (рис. 16.3, б) — максимально возможное по тяговому усилию заглубление ковша в начале операции с постепенным
Длина пути набора z
| Рис. 16.3. Продольный профиль выемок, образованных скреперами |


 •« -s:
•« -s:

выглублением по мере его заполнения. Удовлетворительные результаты дает гребенчатый способ (рис. 16.3, в) при разработке суглинистых и глинистых грунтов, а также клевковый способ (рис. 16.3, г) при разработке сухих песков и супесей.
Основным недостатком разработки прочных грунтов является ограниченная возможность проталкивания фунта в ковш через слой находящегося там грунта в заключительной стадии заполнения ковша. Вследствие этого тяговая способность скрепера может исчерпаться прежде чем заполнится ковш. Более эффективно заполняются ковши со ступенчатыми 11 и 12 (см. рис. 16.2, а) или полукруглыми, выступающими в средней части ножами, где грунтовая стружка имеет большую толщину. Лучшие результаты дает принудительная загрузка, для чего в передней части ковша устанавливают скребковый элеватор (рис. 16.4) или шнеки, которые отделенный от массива грунт забрасывают в ковш. Такая загрузка повышает наполнение ковша в среднем на 20 %. Повысить наполняемость ковша можно за счет увеличения тягового усилия путем применения толкачей, в качестве которых используют оборудованные буферами тракторы или бульдозеры. При копании толкач заходит в хвост скрепера и, упираясь в его буфер (за задними колесами), сообщает ему дополнительное тяговое усилие. Это позволяет обычно увеличивать толщину стружки в среднем до 40 %.
Толкачи эффективно применяют при бригадной работе нескольких скреперов. В зависимости от вместимости ковша и дальности возки один толкач может обслуживать 2… 16 скреперов, оставаясь все время в зоне разработки грунта. Еще более эффективно использование скреперных поездов, состоящих из двух самоходных скреперов, соединяемых на время копания управляемым сцепным устройством. Сначала совместным тяговым усилием двух тягачей заполняется передний скрепер, а затем задний, после чего скреперы разъединяются и движутся к месту отсыпки грунта раздельно. При таком способе ковши могут быть наполнены более чем на 10 % выше их геометрической вместимости.
| Рис. 16.4. Загрузка ковша скрепера скребковым элеватором |
При работе в транспортном режиме груженые скреперы преодолевают уклоны до 12…15%,ас порожним ковшом до 15… 17 %. Предельная крутизна спусков для груженых скреперов составляет 20…25%, с порожним ковшом — 25…30%, меньшие значения
ХУ)
для самоходных, большие для прицепных скреперов. Крутые подъемы груженые скреперы преодолевают с помощью толкачей. Техническую производительность скреперов определяют как
где q — геометрическая вместимость ковша, м3; кн— коэффициент наполнения ковша (в среднем для скреперов без толкачей при разработке песков — 0,6…0,9; глин — 1… 1,1; супесей и суглинков — 1,1… 1,2; черноземов — 1,1… 1,25); tn — продолжительность рабочего цикла, с; кр — коэффициент разрыхления грунта. Продолжительность рабочего цикла
>ц = 3,6 [/К/Ч lTT/vTr Ip/Vp /тп/Чп] tnll,
где /к, /тг, /р и /тп — длины путей соответственно при копании, передвижении груженого скрепера, разгрузке и передвижении порожнего скрепера, м; vK, vTT, »ри»и— скорости передвижения на этих путях, км/ч; tn — продолжительность одного поворота, с (в среднем 12 … 15 с); п — число поворотов за рабочий цикл. Длины путей копания и разгрузки
/к = qkJiBc^kJ; /p = qkJ(Bh),
где В — ширина ковша, м; сср — средняя толщина грунтовой стружки, м; h — толщина слоя отсыпки грунта, м.
Длины путей /тг и /г,,, а также число поворотов п определяют в соответствии со схемой передвижения скрепера. Скорость vkb среднем составляет 0,65…0,8 паспортной скорости тягача на первой передаче, a vp — примерно 0,75 паспортной скорости.
Эксплуатационная производительность
Пэ = Пткв,
где кв — коэффициент использования скрепера во времени (в среднем при расчете сменной, месячной и годовой производительности соответственно равен 0,8…0,9; 0,5…0,65; 0,4…0,5).
Бульдозеры
Основное назначение бульдозера — послойная разработка грунта с последующим его перемещением перед отвалом по поверхности земли на небольшие расстояния (до 150 м). Бульдозеры применяют для выполнения следующих работ: снятия плодородного поверхностного слоя грунта при подготовке строительных площадок; перемещения грунта в зону действия одноковшового экскаватора при погрузке его в транспортное средство или отвал; разработки неглубоких каналов с транспортированием грунта в отвалы; зачистки пологих откосов; сооружения насыпей из резервов; планировочных работ при зачистке оснований под фундаменты
зданий и сооружений и планировке площадей и трасс; по устройству и содержанию в исправности подъездных дорог, устройстве въездов на насыпи и выездов из выемок; для разработки грунта на косогорах; по обратной засыпке траншей и пазух фундаментов; разравнивания грунта в отвалах; штабелирования и перемещения сыпучих материалов; подготовительных работ для валки отдельных деревьев, срезки кустарника, корчевки пней, удаления камней, расчистки поверхностей от мусора, снега; вскрышных работ, а также использования их в качестве толкачей скреперов. Эффективность работы бульдозера в значительной мере зависит от проходимости базового трактора и его тягово-сцепных свойств.
По номинальной силе тяги и мощности двигателей различают бульдозеры малогабаритные с силой тяги до 25 кН и мощностью до 45 кВт, легкие — 25… 135 кН и 45… 120 кВт, средние — 135…200 кН и 120… 150 кВт, тяжелые — 200…300 кН и 150…225 кВт и сверхтяжелые — более 300 кН и 225 кВт.
Бульдозерные отвалы как вспомогательное рабочее оборудование навешивают на пневмоколесные экскаваторы и другие машины для очистных и планировочных работ в составе рабочих процессов этих машин.
Бульдозер (рис. 16.5, а) состоит из базового пневмоколесного или гусеничного трактора 8 и навесного рабочего оборудования в виде отвала 5 с цилиндрической рабочей поверхностью и ножами 4 в его нижней части, соединенного с базовым трактором шарнирами 1 через два толкающих бруса 2 или универсальную раму 3 (рис. 16.5, в), и гидравлической системы управления отвалом.
Отвал на толкающих брусьях (рис. 16.5, а и б) имеет боковые стенки и установлен режущей кромкой ножей перпендикулярно продольной оси машины. Наклон отвала в вертикальной плоскости регулируют раскосами 6 либо путем изменения их длины, либо положения места их крепления к отвалу или толкающим брусьям. Управляют отвалом при его переводе из транспортного положения в рабочее и наоборот одним (малогабаритные бульдозеры) или двумя гидроцилиндрами 7, питаемыми рабочей жидкостью от гидравлической системы базового трактора. Бульдозеры с таким отвалом, называемым неповоротным, используют, в основном, на послойной разработке грунтов. У некоторых моделей бульдозеров предусмотрена регулировка наклона отвала в вертикальной плоскости (перекос) гидроцилиндром, изменением длины одного раскоса или места его крепления (рис. 16.5, г).
Рабочий цикл бульдозера с неповоротным в плане отвглом состоит из операций копания грунта (его отделения от массива и накопления перед отвалом — образования призмы волочения), его транспортирования волоком перед отвалом к месту укладки, разгрузки отвала и возвращения машины на исходную позицию следующего рабочего цикла.
Рис. 16.5. Бульдозер:
а — вид сбоку; б — вид в плане на бульдозер с неповоротным отвалом; в — то же, с поворотным отвалом; г — перекос отвала; д — сменные рабочие органы
При копании бульдозер перемещается на рабочей скорости, обычно соответствующей первой передаче, с целью получить возможно большее тяговое усилие. Для сокращения продолжительности копания желательно предельно сокращать путь копания, для чего грунт следует разрабатывать с возможно большей толщиной стружки, которая в слабых грунтах обычно ограничена ходом поршня гидроцилиндра заглубления отвала, а в прочных грунтах —
буксованием движителя. Желательно иметь постоянную толщину стружки на всем пути копания, что обычно реализуется только при разработке слабых грунтов. С повышением прочности грунта тяговая способность бульдозера может быть исчерпана в середине пути копания или недостаточной еще в начале копания. С учетом того, что по мере накопления грунта перед отвалом растут сопротивления формированию призмы волочения и ее передвижению волоком по ненарушенному грунту, грунт разрабатывают клиновым или гребенчатым способами (см. рис. 15.3, бив)
При разработке весьма плотных грунтов, например, уплотненных транспортом или другими способами, внедрение ножа отвала в грунт оказывается практически невозможным. В этих случаях применяют отвалы с выступающим средним ножом или грунт предварительно разрыхляют. Весьма эффективно для таких условий применять навешенный в задней части базового трактора рыхлитель (рис. 16.6), или специальные сменные отвалы. Отвал 13 (см. рис. 16.5, д) оборудован одним передним и двумя задними зубьями. При движении машины задним ходом задние зубья прорезают в грунте прорези, а при последующем движении передним ходом грунт дополнительно разрыхляют передним зубом и захватывают отвалом. Для взламывания асфальтовых покрытий при ремонте дорог применяют отвалы 14, оборудованные киркой в передней части. Мерзлые грунты разрабатывают отвалами 75 с гребенчатыми ножами или с установленными на ножах зубьями.
| Рис. 16.6. Бульдозер-рыхлитель |
По завершении операции копания отвал устанавливают ножами на уровень земли и в таком положении бульдозер перемещают передним ходом на возможно большей скорости к месту отсыпки грунта. Во время транспортирования грунта часть его теряется по пути, ссыпаясь по сторонам отвала. Доля потерь зависит от вида грунта (наибольшие потери у несвязных, например, песчаных грунтов) и от дальности транспортирования. Эти потери не сказывают-
ся на производительности бульдозера, разрабатывающего выемку, поскольку производительность в этом случае определяют по объему вынутого из выемки грунта. В случае сооружения насыпи ее определяют по объему доставленного в насыпь грунта. Влияние потерь грунта при его транспортировании на производительность бульдозера в этом случае ощутимо. Так, при транспортировании грунтов I—III категории (кроме сухого песка) на расстояние 40 м сменная производительность бульдозера примерно в 2,2 раза выше, чем при транспортировании тех же грунтов на расстояние 100 м.
Эффективным средством снижения потерь грунта является сокращение дальности транспортировки. На большие расстояния грунт перемещают с устройством промежуточных валиков, траншейным способом или с применением нескольких бульдозеров. Способ транспортирования грунта с устройством промежуточных валиков заключается в том, что сначала грунт перемещают на 40…50 м, накапливая его в первом валике, из которого его перемещают во второй валик на такое же расстояние — к месту укладки.
При транспортировании грунта траншейным способом на всех рабочих циклах бульдозер перемещают по одной и той же трассе. Ссыпающийся по бокам отвала грунт образует валики, которые уменьшают потери грунта при последующих проходах бульдозера. Лучший эффект достигается при незначительном заглублении отвала в грунт вдоль трассы транспортирования и образовании таким образом неглубокой траншеи.
Транспортирование грунта одновременно несколькими бульдозерами применяют при достаточно широком фронте работ. При этом способе несколько бульдозеров передвигаются рядом с минимальными (до 0,5 м) зазорами между отвалами. Этот способ требует четкой координации движения всех машин с одинаковой скоростью, так как рассогласование скоростного режима равноценно по потерям грунта раздельной работе бульдозеров.
При разработке слабых грунтов производительность бульдозеров можно увеличить за счет использования дополнительных устройств к отвалам, изменяющих форму и объем последних (в 1,7 — 1,8 раз) в виде лобовых щитков, закрепляемых в верхней части отвала, уширителей и открылков на его боковых стенках.
Производительность можно повысить за счет правильного выбора трассы транспортирования грунта, отдавая предпочтение движению под уклон. Влияние уклона на объем перемещаемого перед отвалом грунта иллюстрируется схемой (рис. 16.7), из которой следует, что при движении по пересеченной трассе переход от уклона 7 к горизонтальному участку 2 или последнего к подъему 3 при одном и том же естественном откосе 4 связан с неизбежными потерями грунта. При перемещении под уклон 10… 12° можно повысить выработку бульдозера по сравнению с движением по горизонтальной трассе на 30…40%, и наоборот, при движении
на подъем 10° производительность бульдозера снижается почти вдвое.
| Рис. 16.7. Влияние рельефа местности на эбъем фунта перед отвалом бульдозера при его транспортировке |
Отсыпают грунт совместно с планировкой поверхности или без нее. В первом случае отвал несколько поднимают над землей, и при движении бульдозера на малой скорости вперед грунт высыпается в зазор ниже режущей кромки отвала, а в дальнейшем, после выхода машины на отсыпанную возвышен-
лостъ — вперед, наращивая последнюю. Частично отсыпанный рунт уплотняется перемещаемыми по нему движителями. Освобождение отвала от фунта без его планировки заключается в от-«зде от него бульдозера задним ходом. Так, в частности, засыпают траншей и пазухи фундаментов.
Возвращают бульдозер на исходную позицию следующего ра-ючего цикла на максимально возможной скорости задним (при 1ебольших расстояниях передвижения) или передним ходом с )азворотами.
Техническую производительность бульдозеров на послойной )азработке грунтов определяют в зависимости от вида земляного юоружения. При разработке выемок она равна объему грунта, $ынутого из выемки за 1 ч непрерывной работы, приведенному к ыотному состоянию:
птв = 3600 к^/ад),
Де Kip — объем призмы волочения в конце копания в разрыхлен-юм состоянии, м3; Гц — продолжительность цикла, с; кр — коэффициент разрыхления грунта.
Объем призмы волочения является функцией ширины В и вы-:оты В отвала:
де кпр— коэффициент пропорциональности, зависящий от кру-изны откоса в призме волочения и от отношения Н/В. При И/В = = 0,15…0,45 он изменяется в пределах 0,65…0,6 для связных (гли-1ы, суглинки) и 0,45…0,35 для несвязных (пески, супеси) фунтов. Продолжительность рабочего цикла (в секундах) при движе-1ии бульдозера передним ходом с разворотами на концах участка [ередвижения
/ц = 3,6 [ lK/vp IT/vT
/Т)/Ч.х]
L,
а при возвратном движении задним ходом
/ц = 3,6[ lK/vp lT/vT (/к /T)/w,.x] ty,
где /к и /т — длины участков копания и транспортировки (несовмещенной с копанием), м; vp, щ, vnxи v3x — скорости рабочего, транспортного, возвратного вперед и возвратного назад ходов, км/ч; tnи ty— время, затрачиваемое на повороты и управление машиной в течение рабочего цикла, с.
Все скорости определяют расчетом исходя из условий полного использования тягово-сцепных свойств базового трактора и с учетом буксования, особенно в режиме копания, уменьшая рабочие скорости на 20…30% против расчетных. Так же, на основании расчета определяют продолжительность поворота бульдозера, а затраты времени на управление машиной принимают 7…8 с.
Если работы по копанию и транспортированию грунта полностью совмещены, как, например, при засыпке фунтом траншей, то последняя зависимость преобразуется к виду:
= з,б/к(1АР
ty.
При возведении насыпей техническую производительность вычисляют по объему отсыпанного грунта, приведенного к плотному состоянию, с учетом потерь при его транспортировании через края отвала в боковые валики, которые составляют З…6% от текущего объема призмы волочения:
где кп— коэффициент потерь грунта.
Отвал 5 бульдозера с поворотным в плане отвалом не имеет боковых стенок (см. рис. 16.5, в). Он соединен с рамой 3 универсальным шарниром 12 в ее центральной части, который позволяет отвалу поворачиваться в плане в каждую сторону на угол 30…36° гидроцилиндрами // с последующим закреплением толкателей Юна раме 3. Наклон отвала в вертикальной плоскости, а также его перекос осуществляется рассмотренными выше способами для неповоротного отвала. Для одновременной планировки откосов и их подошвы отвал дополнительно оборудуют наклонной наставкой 16 (см. рис. 16.5, д) с жестким или шарнирным соединением с основным отвалом. В последнем случае наклон наставки регулируют специально установленным гидроцилиндром. Наставка 17 соответствующего профиля предназначена для очистки и планировки канав. Для перемещения грунта от стен зданий применяют отвальную приставку 18, двигаясь при этом задним ходом. Эффективность работы бульдозера на расчистке поверхностей от кустарника и мелких деревьев существенно повышается за счет установки в средней части отвала кусторезного ножа 19.
Поворотные отвалы, применяемые как вспомогательное рабочее оборудование на машинах иного назначения, обычно устанавливают с постоянным углом захвата (углом наклона режущей кромки к направлению движения машины), жестко закрепляя на подъемной раме.
| Рис. 16.8. Схема формирования призмы волочения на поворотном в плане отвале |
Бульдозеры с поворотным отвалом, выполняющие планировочные работы, а также очистку поверхностей от строительного мусора, снега, работают в непрерывном режиме. Отделенный от массива грунт (или другие материалы) перемещается по отвалу вверх и в сторону его наклона в плане по винтовым траекториям 1 (рис. 16.8). При этом призма волочения, увлекаемая потоками грунта, непрерывно перемещается в сторону наклона отвала (направление 2) за его край и укладывается в виде валика параллельно направлению движения машины. Такое взаимодействие рабочего органа с грунтом, которое приводит к сдвигу грунта вдоль режущей кромки, называют косым резанием. При косом резании возникают дополнительные сопротивления перемещению грунта вдоль отвала.
Техническая производительность бульдозера на планировочных работах
Пт = 3600 L[Bn-b(n-l)]/tz,
(16.1)
 где Пт — техническая производительность бульдозера, м2/ч; L — длина планируемого участка, м; В — ширина захвата, м; п — число полос планировки; b — ширина полосы перекрытия между смежными полосами планировки; /Е — суммарная продолжительность планировки участка, с.
где Пт — техническая производительность бульдозера, м2/ч; L — длина планируемого участка, м; В — ширина захвата, м; п — число полос планировки; b — ширина полосы перекрытия между смежными полосами планировки; /Е — суммарная продолжительность планировки участка, с.
При движении для последующих проходов с разворотами машины
tz = [3,6L/vp ty)n tn(и — l)]z, (16.2)
а при холостом заднем ходе {челночная схема) —
Vp «I
(16.3)
 где z — число повторных проходов по одному следу.
где z — число повторных проходов по одному следу.
Из сравнения этих выражений следует, что работа по челночной схеме производительней работы с разворотами машины при условии L < v3Xtn(n- 1)/(3,6я).
Бульдозеры также используют на грузоподъемных работах, для чего их отвалы оборудуют грузовыми вилами 20 (см. рис. 16.5, д) или траверсами с подъемными крюками 21.
16.4. Автогрейдеры
Автогрейдером (рис. 16.9) называют землеройно-транспортную машину на пневмоколесном ходу с отвальным рабочим органом, предназначенную для послойной разработки грунтов I и II категорий и планировки земляных поверхностей при строительстве и содержании автомобильных и железных дорог, аэродромов, а также используемую в промышленном, гражданском, гидротехническом и ирригационном строительстве. С помощью автогрейдеров профилируют и планируют поверхности при возведении насыпей высотой до 0,6 м, отрывают и очищают кюветы и канавы треугольного и трапецеидального профилей, сооружают корыта для дорожных оснований, перемешивают и разравнивают грунт, щебень, гравий и вяжущие материалы, а также разрушают дорожные покрытия при ремонте дорог, расчищают от снега дороги и площади.
В зависимости от массы машины и мощности силовой установки автогрейдеры разделяют на легкие (массой до 9 т и мощностью до 50 кВт), средние (до 13 т, до 75 кВт), тяжелые (до 19 т, до 150 кВт) и особо тяжелые (более 19 т, более 150 кВт). По конструктивному исполнению ходовых устройств они бывают двухосными и трехосными. Особенности конструкции ходового устройства отражаются колесной формулой типа АхВхС, где А, В и С — число осей,
 -4 3
-4 3
Рис. 16.9. Автогрейдер
соответственно, управляемых, ведущих и общее. Например, трехосный автогрейдер с двумя ведущими задними осями и передней осью с управляемыми колесами имеет колесную формулу 1x2x3. Автогрейдеры с этой формулой получили наибольшее распространение в строительстве. По способу управления рабочим органом различают автогрейдеры с механической (обычно легкие автофейдеры) и гидромеханической системами привода.
Рабочим органом автогрейдера является отвал 6 (см. рис. 16.9). Он расположен в средней части машины между передними 4 и задними 8 колесами на поворотном круге 7, установленном на тяговой раме 5. Последняя соединена в передней части универсальным шарниром с несущей (хребтовой) балкой 2, жестко соединенной с рамой ведущих (задних) колес и опирающейся на ось передних колес. Тяговая рама двумя гидроцилиндрами / может быть установлена задней частью на любой высоте, а также перекошена в вертикальной плоскости. С помощью специального гидроцилиндра она может быть вынесена в любую сторону, в том числе за пределы колеи машины.
Эти кинематические возможности позволяют ориентировать отвал произвольно в плане и в вертикальной плоскости, включая вертикальные перекосы, выносить его в любую сторону от продольной оси движения автогрейдера. Кроме того, разовой установкой отвал можно выдвинуть в сторону относительно тяговой рамы, а также изменить его угол резания. При необходимости отвал дооборудуют специальными приставками, например для одновременной планировки подошвы и откоса насыпи, бровки и откоса выемки, профилирования придорожных канав и т.п. Для предварительной обработки плотных грунтов автогрейдер оснащают кирковщиком 3, бульдозерным отвалом или другим вспомогательным оборудованием, устанавливаемым в передней части машины и управляемым гидроцилиндрами.
Для придания автогрейдеру поперечной устойчивости, в частности, при работе на косогорах, управляемые колеса делают наклоняющимися в вертикальной плоскости. Задние колеса устанавливают попарно с каждой стороны на балансирных балках, что в сочетании с шарнирным опиранием хребтовой рамы на переднюю ось обеспечивает опирание на поверхность передвижения всех колес машины независимо от микронеровностей рельефа.
Положительной особенностью автофейдеров как машин для планировочных работ является расположение отвала в средней части машины между передними и задними колесами. При наезде колесами на неровности в полосе движения высотные отклонения режущей кромки отвала будут незначительными, существенно меньшими, чем при консольном расположении бульдозерного отвала. Это качество позволяет планировать земляные поверхности с меньшим числом повторных проходок, чем при работе бульдозера.
Рабочий процесс автогрейдера включает копание фунта, его перемещение и укладку с разравниванием в земляное сооружение. При разработке грунта отвал устанавливают режущей кромкой как параллельно его поверхности, так и наклонно под углом 10… 15° с заглублением отвала по ширине. Угол резания составляет 35 …45° соответственно при разработке тяжелых и легких грунтов. При за-резании отвала в грунт одним концом угол между режущей кромкой отвала и продольной осью машины (угол захвата) принимают равным 35…50°, при отделочных планировочных работах 45…90°, при копании с отводом грунта в сторону по отвалу 60°.
В зависимости от размеров обрабатываемого участка, рельефа местности, наличия искусственных сооружений автогрейдеры движутся по круговым и челночным технологическим схемам. Так, в дорожном строительстве при длине обрабатываемого участка (захватки) 400… 1500 м автофейдеры движутся по круговым технологическим схемам, а при меньших длинах — челночным способом (в одном направлении — вперед, в обратном — задним ходом). При этом в случае очень коротких захваток (около 150 м) фунт разрабатывают движением автогрейдера вперед, после чего возвращают машину на исходную позицию следующей проходки вхолостую задним ходом на повышенной скорости. При больших длинах захваток фунт разрабатывают автофейдером при его движении как передним, так и задним ходом с разворотом отвала на 180° в плане на концах захватки.
Техническую производительность автофейдера определяют, как и для бульдозера, по формулам (16.1) —(16.3).
§
Машинами
Особенности рабочих процессов землеройно-транспортных машин (ЗТМ) затрудняют полную автоматизацию их управления без участия машиниста, в связи с чем в настоящее время автоматизированы те операции и рабочие движения этих машин, которые в наибольшей мере определяют производительность труда и эффективность их использования. В системах автоматического управления (САУ) ЗТМ обычно используют дискретные электронные системы на основе полупроводниковых элементов, обеспечивающих надежность работы системы за счет применения бесконтактных элементов. Они имеют сравнительно большой срок службы, малые габаритные размеры, потребляют небольшое количество энергии, работают от простых источников питания. САУ внедрены лишь на части отечественных ЗТМ выпусков последних лет. Значительная часть ЗТМ не имеет такого управления.
В системах автоматического управления ЗТМ решаются задачи стабилизации углового положения ковша или отвала в продольном
(относительно продольной оси машины) и поперечном направлениях, а также высотного положения режущей кромки рабочего органа. Кроме того, решается задача автоматической защиты двигателя от перегрузок.
Стабилизация углового положения рабочего органа в продольном направлении осуществляется за счет использования маятниковых датчиков — преобразователей углового положения (см. рис. 6.8, а), устанавливаемых на продольно расположенных элементах рабочего органа (4 и 5 — рис. 16.10 и 5— рис. 16.11).
Система автоматического управления «Стабилоплан-10»состоит из преобразователя углового положения 5 (рис. 16.10), пульта управления 2, аккумуляторной батареи 3, блока управления 1 и гидрораспределителя 4 с электрогидравлическим управлением. При отклонении ковша от заданного положения относительно горизонта маятник преобразователя подает электрический сигнал на блок управления, который после обработки последнего выдает команду электромагнитам гидрораспределителя гидравлической системы скрепера, управляющего гидроцилиндрами подъема и опускания ковша. При опускании ковша в процессе движения скрепера по неровной поверхности гидрораспределитель направляет рабочую жидкость в штоковые полости гидроцилиндров на подъем ковша, а при его подъеме — в их поршневые полости на опускание ковша.
Система стабилизации отвала бульдозера,являющаяся частью САУ «Комбиплан-ЮЛ» (рис. 16.11), работает в описанном выше режиме. Так же работает САУ поперечной стабилизации углового положения отвала с преобразователем 6.
Автоматические системы с маятниковыми преобразователями стабилизируют объект управления только по одному параметру. В описанном случае — по углу отклонения от заданного положения. Если по каким-либо причинам ковш оказался на отличном от первоначального уровне, то дальнейшая стабилизация будет осуществляться относительно этого нового уровня. Таким образом, рассматриваемая автоматическая система не гарантирует стабилизации по заданному уровню. Этого недостатка лишены копирные системы.

Рис. 16.10. Схема размещения приборов системы «Стабилоплан-10» на скрепере:
1 — блок управления; 2 — пульт управления; 3 — аккумуляторная батарея; 4 — гидрораспределитель; 5 — преобразователь углового положения
Рис. 16.11. Схема размещения приборов САУ отвалом бульдозера
Так, в САУ отвала бульдозера «Комбиплан-ЮЛ» подсистемы продольной и поперечной стабилизации рабочего органа работают в автономном режиме, на который САУ переключается с пульта управления 1. При работе же в копирном режиме лазерный луч, исходящий из излучателя 9, питаемого от аккумуляторной батареи 11 и установленного на треноге 10 на расстоянии 5…500 м, воспринимается фотоприемным устройством 8 на штанге 7, закрепленной на отвале бульдозера. При смещении отвала по высоте, а вместе с ним и фотоприемного устройства на электромагниты гидрораспределителей 3 подается соответствующая команда, и гидроцилиндры перемещают отвал до восстановления заданного уровня. На базе одного лазерного излучателя могут работать несколько бульдозеров (до 10), оборудованных системой «Комбиплан-ЮЛ».
Так же работает САУ ковша скрепера «Копир-стабилоплан-10»,состоящая из описанной выше системы «Стабилоплан-10» и ко-пирного устройства.
Для управления отвалом автогрейдера применяют САУ «Профиль-1»и «Профиль-2»и заменяющие их системы второго поколения «Профиль-10»и «Профиль-20».САУ «Профиль-1» и «Профиль-10» стабилизируют поперечные уклоны отвала, а САУ «Профиль-2» и «Профиль-20», кроме того — его продольные уклоны. При работе автогрейдера в автоматическом режиме с использованием САУ «Профиль-10» выходной сигнал датчика 6 (рис. 16.12), соответствующий поперечному положению отвала 7, сравнивается в полупроводниковом сравнивающем устройстве блока управления / с сигналом задатчика. При рассогласовании сигналов, превышающем зону нечувствительности системы, усилитель включает золотник 2, который соединяет напорную и сливную магистрали гидросистемы с соответствующими полостями управляемого гидроцилиндра 4.
 2 3
2 3
5 6
Рис. 16.12. Блок-схема САУ «Профиль-10»:
/ — блок управления; 2 — электрогидрозолотник с гидроблоком; 3 — гидролинии; 4— управляемый гидроцилиндр; 5— рама автогрейдера; 6— датчик; 7— отвал; 8 —
электрическая проводка
САУ «Профиль-20» включает в себя два канала управления — стабилизации углового положения отвала в поперечном направлении и его высотного положения относительно копира. Датчик поперечной стабилизации устанавливают на поперечной балке тяговой рамы, а щуповый датчик — на одном конце отвала. Сигнал датчика при отклонении отвала от заданного уровня по высоте преобразуется в команду управления аналогично описанному выше.
В последнее время некоторые модели автогрейдеров оборудуют САУ «Профиль-30», включающей в себя подсистему «Профиль-20», дополнительно оборудованную подсистемой стабилизации заданного курса движения автогрейдера путем воздействия на рулевое колесо.
В рассматриваемые САУ включены также подсистемы, обеспечивающие защиту двигателя от перегрузки за счет снижения частоты вращения коленчатого вала. Для этого служит блок 2 (см. рис. 16.11), который в указанном режиме работы двигателя подает электрический сигнал на заглубление ковша, снижая тем самым его нагрузку.
Контрольные вопросы
1. Для чего предназначены землеройно-транспортные машины? Ка
кими рабочими органами они оборудованы? Каковы особенности рабо
чих процессов землеройно-транспортных машин?
2. Для чего предназначены скреперы? Из каких операций состоит их
рабочий цикл? Какова дальность транспортировки грунта этими маши
нами? Назовите главный параметр скрепера. Приведите классификацию
этих машин.
3. Как устроен и как работает самоходный скрепер? Перечислите спо
собы разгрузки скреперных ковшей. Какими способами разрабатывают
грунт скреперами? Охарактеризуйте способы эффективной загрузки ков-
шей. Какие уклоны могут преодолевать скреперы в режиме транспортировки грунта?
4. Как определяют техническую и эксплуатационную производитель
ность скрепера?
5. Для чего предназначены бульдозеры? Какие виды работ они могут
выполнять? Приведите классификацию бульдозеров.
6. Как устроен и как работает бульдозер с неповоротным в плане от
валом? Какими способами разрабатывают грунт бульдозером? Для чего в
качестве одного из рабочих органов бульдозера-рыхлителя используют
рыхлительное оборудование? Какими сменными рабочими органами
оборудуют бульдозеры?
7. Какими мерами снижают потери грунта при его транспортирова
нии бульдозерами?
8. Как определяют техническую производительность бульдозеров, по
слойно разрабатывающих грунт?
9. Как устроен и как работает бульдозер с поворотным в плане отва
лом? Как определяют техническую производительность бульдозера, за
нятого на планировке земляных поверхностей? При каких условиях чел
ночная схема работы бульдозера производительней работы с разворота
ми на концах захватки?
10. Для чего предназначены автогрейдеры? Какие виды работ они могут
выполнять? Приведите классификацию автогрейдеров. Какова структура
колесной формулы этих машин? Автогрейдеры с какой колесной фор
мулой наиболее всего распространены в строительстве?
11. Как устроен и как работает автогрейдер? Охарактеризуйте возмож
ные установочные положения отвала автогрейдера. Для чего передние
колеса имеют возможность наклоняться в вертикальной плоскости? Чем
обеспечивается опирание всех колес машины на поверхность передви
жения? Каким образом обеспечиваются лучшие планировочные каче
ства автогрейдеров по сравнению с бульдозерами, работающими в ре
жиме планировки земляных поверхностей? Назовите технологические
схемы движения автофейдеров. При каких условиях они реализуются?
12. Какие задачи решаются благодаря использованию автоматических
систем управления землеройно-транспортными машинами? Приведите
структурные схемы этих систем и объясните принцип их работы.
§
Бурение — это процесс разрушения грунта с образованием в грунтовом массиве цилиндрических полостей и выносом из них продуктов разрушения на поверхность. При диаметре до 75 мм и глубине до 9 м полости называют шпурами, при больших размерах — скважинами. В строительстве бурение осуществляют для проведения инженерно-геологических изысканий, при разработке грунтов взрывом, при водоснабжении и водопонижении, для установки столбов, дорожных знаков и надолб, устройства бурона-бивных свай и т.п.
Различают механические и физические способы бурения. В большинстве бурильных машин и оборудования реализованы механические способы бурения с вращательно-поступательным, ударно-
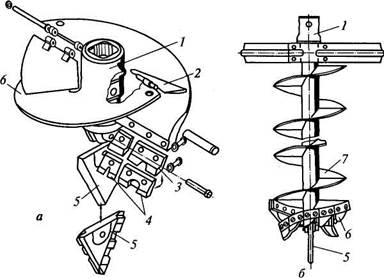
Рис. 17.1. Буровой инструмент:
а — лопастнойбур; б — шнековый бур; в — шнековый бур-расширитель; г — трехшарошечноедолото; д — зубильное долото; е — крестовое долото; ж — ударная
штанга; з — желонка —
вращательным и ударным движениями рабочего инструмента. В качестве рабочих органов для механического бурения применяют лопастные, шнековые и ковшовые буры, буры-расширители, трех-шарошечные и ударные долота (рис. 17.1).
Лопастной бур(см. рис. 17.1, а) состоит из трубчатого остова / с двумя копающими лопастями 6 в виде двухзаходного винта, забурника 5 и заслонок 2. Забурник направляет и удерживает бур на оси бурения. Заслонки, шарнирно прикрепленные к лопастям, препятствуют просыпанию грунта при его извлечении из скважины. Бур крепят к нижнему концу граненой штанги. Для работы в мерзлых грунтах лопасти и забурник оснащают резцами, армированными твердосплавными пластинками 4.
У шнекового бура(см. рис. 17.1, б) остов длиннее, чем у лопастного. К нему приварена спираль 7из полосовой стали, образующая шнек. В нижней части остова закреплены копающие лопасти 6 и забурник 5.
Лопастной и шнековый буры разгружают после их извлечения из скважины вращением с повышенной скоростью, вследствие чего находящиеся на их лопастях и шнековой спирали продукты бурения рассыпаются в стороны за счет центробежных сил.
Ковшовый бурпредставляет собой полый цилиндр с откидным дном и ножами в его нижнем торце. Срезаемый ножами грунт заполняет внутреннюю полость бура через окна в его днище. После заполнения его извлекают из скважины и разгружают через открытое днище.
Буром-расширителем(см. рис. 17.1, в), закрепляемым на буровой штанге / в ее нижней части, расширяют полость скважины под пяту сваи. При вращении штанги ножи 9 с рычагами 8 опускаются под действием собственного веса и срезают грунт, который ссыпается в ковш 10. Разгружают ковш, как описано выше. Качество зачистки забоя скважины влияет на несущую способность буронабивной сваи, поэтому разрыхленный грунт в забое уплотняют специальными трамбовками.
Шарошечное долото(см. рис. 17.1, г) состоит из трех сваренных между собой лап, на концах которых на подшипниках качения установлены шарошки с углом наклона осей к центральной оси долота 50…60°. Шарошка представляет собой корпус из кованой стали с запрессованными в его тело твердосплавными зубками. При вращении штанги шарошки вращаются вокруг своих осей и относительно оси долота. Через пустотелую штангу и отверстия в корпусе долота и шарошках подают сжатый воздух от компрессорной установки для выноса на поверхность буровой мелочи.
Продукты бурения удаляют из скважины специальными инструментами, промывкой скважины водой, а также продувкой. В случае промывки или продувки для работы в комплекте с буровой машиной применяют насосную или компрессорную установку, что повышает стоимость буровых работ. Для промывки скважины требуется большое количество воды, в связи с чем этот способ применяют, в основном, при работе вблизи водоемов. При этом, во избежание загрязнения рабочей площадки и создания обслуживающему персоналу нормальных рабочих условий, требуется принять меры по отводу от устья скважины водогрунтовой смеси. При продувке скважины воздухом в рабочей зоне бурильной машины образуется пылевое облако с большим содержанием абразивных частиц, вредно влияющих на организм человека и способствующих быстрому абразивному износу шарниров машины, элементов ее гидропривода и других кинематических пар. Для защиты от вредного воздействия пыли требуется принимать специальные меры, включая ин-
дивидуальную защиту, например респираторы. Очищать скважину от буровой мелочи продувкой допустимо лишь в случаях, когда невозможно использовать другие способы.
К физическим способам бурения относятся термический, ультразвуковой, электрогидравлический, высокочастотный и гидравлический. Из них практическое применение нашел лишь термический способ, реализованный в станках термического бурения. Остальные способы бурения находятся в стадии теоретических и экспериментальных разработок.
17.2. Машины и оборудование вращательно-поступательного
бурения
Бурильные машины с вращательно-поступательным движением бурового инструмента изготавливают на базе грузовых автомобилей, гусеничных и пневмоколесных тракторов. Кроме того, буровое оборудование монтируют в качестве сменного рабочего оборудования на одноковшовых гидравлических экскаваторах, малогабаритных погрузчиках с бортовым поворотом и других машинах.
Главным параметром бурильной машины является глубина бурения, по которой различают машины легкие, средние и тяжелые с глубиной бурения соответственно до 5, 20 и свыше 20 м.
Легкие бурилыю-крановые машиныприменяют для бурения скважин в однородных грунтах. Рабочее оборудование такой машины (рис. 17.2) на базе грузового автомобиля, состоящее из полой бурильной штанги Зс гидроцилиндром внутри нее, вращателя 5, приводимого через механическую трансмиссию от двигателя базового автомобиля или от индивидуального гидромотора, граненой штанги 6, рабочего инструмента — лопастного 7 или шнекового бура, располагают сзади базового автомобиля 1, закрепляя его шарнирно на

/////////////////////77//////////////// ////////////////////////
Рис. 17.2. Бурильно-крановая машина
1Л
раме последнего. Рабочее оборудование из транспортного положения в рабочее и наоборот переводят гидравлическим цилиндром 2.
Для бурения скважины машину устанавливают на выносные опоры 8, гидравлическим цилиндром, находящимся внутри полой штанги, опускают бур на поверхность земли и включают вращатель. По мере заглубления бура в грунт и накопления на его лопастях (в случае лопастного бура) или на спирали шнека (при шнековом буре) разработанного грунта бур извлекают из скважины и на повышенной скорости вращения освобождают его от продуктов разрушения, после чего бур снова опускают в скважину и повторяют процесс бурения до достижения требуемой глубины.
Для установки столбов в пробуренные скважины легкие бурильные машины оборудуют, кроме того, грузовой лебедкой с канатом, огибающем блоки на голове штанги и оканчивающимся крюковой подвеской 4.
В качестве базы средних бурильных машиниспользуют большегрузные грузовые автомобили и гидравлические экскаваторы 4-й и 5-й размерной группы. Скважины бурят шнековыми и ковшовыми бурами. Последние применяют преимущественно при бурении песчаных грунтов, укрепляя их стенки обсадными трубами.
Принципиальная схема установки рабочего оборудования на базовом автомобиле остается прежней. Обычно вращатель 10 (рис. 17.3)
| Рис. 17.3. Кинематическая схема бурильно-кранового оборудования бурильной машины среднего типа на базе автомобиля |
приводится в движение двумя гидромоторами 14 и /5, один из которых — 14— через зубчатую пару 12 обеспечивает вращение буровой штанги 11 на рабочей скорости, а второй — 75 — через зубчатую пару 9 — вращение на повышенной скорости для освобождения от продуктов бурения вынутого из скважины шнекового бура 13. В связи с необходимостью обеспечения значительного по длине хода буровой штанги прежняя схема напорного механизма оказывается непригодной. Для этого используют два гидроцилиндра 7, установленные симметрично по обе стороны буровой штанги, и работающие перехватом через четырех-кулачковый патрон 8, который охватывает штангу и зажимает ее своими кулачками. В таком положении соединенные штоками с патроном гидроцилиндры опускают буровую штангу до исчерпания полного хода их поршней, после чего кулачки разжимаются, гидроцилиндры поднимают патрон вверх, где его устанавливают на штанге на новом месте. Гидроцилиндры используют только для напорного движения, а для подъема штанги служит лебедка с барабаном 3, приводимым во вращение гидромотором 1 через встроенный в барабан планетарный редуктор 4. Второй конец навиваемого на барабан каната 5 закреплен на вертлюге 6 в верхней части буровой штанги. В поднятом положении штанга удерживается тормозом 2.
| Рис. 17.4. Бурильная машина тяжелого типа на базе одноковшового экскаватора: / — мачта; 2— телескопическая штанга; 3 — гидроцилиндр подачи; 4 — вращатель; 5 — ковшовый бур; 6 — механизм погружения и извлечения обсадных труб; 7 — лебедка |
Особенность работы с ковшовым буромзаключается в его отличной от прежней разгрузке. Для выполнения этой операции бур необходимо отводить в сторону от скважины. С этой целью буровое оборудование устанавливают на поворотной части машины, в частности, на гидравлическом экскаваторе (рис. 17.4).
Рабочим органом машин для бурения шпуровпри разработке прочных грунтов взрывом служит одна или две буровые штанги 1
(рис. 17.5) с резцами или шарошечными долотами на конце. Соответственно различают одно- и двухшпиндельные буровые машины. Верхними гранеными концами штанги входят в полые цапфы ведомых колес редукторов-вращателей 4 и заклиниваются в них, образуя неподвижное соединение. Нижние концы штанг проходят через направляющие отверстия в нижней части рамы 6. Редукторы вместе с приводными гидродвигателями 5 располагают на подвижной каретке 3, перемещаемой гидроцилиндром 2 в направляющих рамы 6. Последняя с помощью гидроцилиндров может быть установлена в вертикальное или наклонное рабочее положение либо уложена вдоль базового трактора в транспортное положение. В случае применения пневмоколесного базового трактора для обеспечения устойчивой работы машины ее устанавливают на выносные опоры 7. Для бурения шпуров машину устанавливают в рабочее положение, опускают подвижную каретку до касания бурами земли и одновременным вращением штанг и их осевым перемещением разрабатывают скважины. Продукты бурения выносятся на поверхность сжатым воздухом от передвижного компрессора или спиральной лентой по длине буровых штанг. При необходимости штангу периодически поднимают над поверхностью земли и вращением освобождают от продуктов бурения.
Рис. 17.5. Двухшпиндельная машина для бурения шпуров на базе пневмоколесного трактора (а) и кинематическая схема привода рабочего органа {б)
Т.АА
17.3. Комплект машин и оборудования
для образования горизонтальных скважин
в насыпях шоссейных и железных дорог
Установки горизонтального бурения применяют для бурения горизонтальных скважин под шоссейными и железными дорогами для прокладки в них трубопроводов, подземных кабельных линий связи и электроснабжения. Эти работы выполняют из отрытого перед насыпью приямка-траншеи (рис. 17.6). Его размеры должны быть достаточными для размещения в нем бурового оборудования и вспомогательных средств. Для контроля за работой на последнем этапе бурения, а также для подготовки к протаскиванию в пробуренную скважину, например, рабочего трубопровода, кабелей такой же приямок роют с противоположной стороны насыпи. По мере разработки скважины и удаления фунта в нее осаживают обсадную трубу 9, которая после окончания буровых работ остается в скважине.
Обсадную трубу 9 укладывают в приямке на катучие опоры //, а внутри нее располагают винтовой конвейер 10 из отдельных секций с резцовой головкой / и забурником на переднем (перед обсадной трубой) конце. Тыльный конец вала винтового конвейера приводят во вращение силовой установкой 6, состоящей из ДВС и механических передач и укрепленной в задней части обсадной трубы хомутами 8. Напорное усилие обсадной трубе сообщают приводимой от того же двигателя лебедкой 5, смонтированной на одной с ним раме 4, через полиспаст 3, неподвижные блоки которого укреплены на якоре 2, вкопанном в насыпь.
Скважину разрабатывают вращением резцовой головки с одновременной подачей ее вместе с обсадной трубой на забой. Разрушенный резцовой головкой грунт поступает на винтовой конвейер, которым он перемещается в обсадной трубе к ее открытому торцу
| Рис. 17.6. Установка горизонтального бурения |
и высыпается на дно траншеи, а из нее экскаватором — в отвал или в транспортное средство. Реактивный момент сил сопротивления грунта разработке воспринимается обсадной трубой, которая по мере продвижения в скважину все больше защемляется фунтом. От возможного проворачивания относительно собственной оси, особенно в начальной стадии проходки, труба страхуется трубоукладчиком 7, удерживающим ее крюком за раму силовой установки.
Длина скважины составляет примерно 60 м. Длины же секций обсадной трубы и винтового конвейера значительно короче длины скважины. Поэтому по мере продвижения трубы и конвейера в скважину их наращивают новыми секциями: трубу — сваркой, конвейер — соединительными муфтами.
В установках для бурения скважин больших поперечных сечений (диаметром 1720 мм) напорное усилие создают гидравлическими цилиндрами, упирающимися в щит, установленный у тыльной стенки приямка.
Скорости проходки скважины составляют от 15 (для скважин диаметром до 630 мм) до 1,4 м/ч (при диаметре скважины 1720 мм), а усилия подачи — от 480 до 7200 кН соответственно. Описанное оборудование уникально по своему назначению. Оно позволяет проводить буровые работы без остановки движения по шоссейным и железным дорогам. Приведенные выше данные по скоростям проходки характеризуют только технические возможности этого оборудования, но не могут служить основанием для определения эксплуатационной продолжительности буровых работ на переходе, в составе которых значительную часть занимают подготовительно-заключительные работы, а также простои различного характера.
Контрольные вопросы
1. Что такое бурение? Как называют земляные сооружения, образо
ванные бурением? Для чего в строительстве применяют бурение грун
тов? Перечислите способы бурения и охарактеризуйте их. Перечислите
виды бурового инструмента. Как они устроены и каков принцип их рабо
ты? Какими способами удаляют продукты бурения из скважины? Оха
рактеризуйте их и приведите сравнительную оценку.
2. Какие машины служат базовыми для изготовления бурильных машин
и навески на них бурового оборудования? Назовите главный параметр бу
рильных машин. Приведите их классификацию по этому параметру.
3. Для чего предназначены, как устроены и как работают бурильно-
крановые машины на базе грузовых автомобилей, в том числе больше
грузных? Каким рабочим инструментом их оснащают? Какие базовые
машины используют для работы с ковшовым буром?
4. Как устроена и как работает машина для бурения шпуров?
5. Из каких машин состоит комплект для бурения горизонтальных
скважин в насыпях шоссейных и железных дорог? Опишите последова
тельность операций бурения. Назовите скорости проходки горизонталь
ных скважин.
§
Машины для подготовительных работ
Подготовительные работы включают в себя очистку будущей строительной площадки от деревьев и кустарника, вывозку древесины, корчевку и уборку пней, удаление валунов, устройство временных дорог и мостов через естественные и искусственные препятствия, понижение уровня грунтовых вод и т.п. Для выполнения этих работ применяют как общестроительные, так и специальные, машины используемые в лесотехнической промышленности, ирригационном строительстве и др. Для выполнения отдельных видов работ успешно используют сменные рабочие органы, навешиваемые на одноковшовые экскаваторы и бульдозеры, в частности, кусторезы и корчеватели-собиратели.
Кусторезы (рис. 18.1, а) применяют для расчистки подлежащих застройке площадей от кустарника и мелких деревьев, а корчеватели-собиратели (рис. 18.1, б) — для корчевки пней диаметром до 500 мм, расчистки участков от крупных камней, сваленных деревьев и кустарников, а также для рыхления плотных грунтов перед их разработкой землеройными и землеройно-транспорт-ными машинами. Эти машины изготавливают как навесное рабочее оборудование на гусеничных тракторах.
| Рис. 18.1. Машины для подготовительных работ: а — кусторез; б — корчеватель-собиратель |
Рабочее оборудование кустореза (см. рис. 18.1, а) представляет собой закрепленный на универсальной раме / отвал 3 клинообразной формы с гладкими или пилообразными ножами 4 в его нижней части и колуном 5 для Раскалывания пней и раздвигания
сваленных деревьев. Поднимают и опускают отвал гидравлическими цилиндрами 2. В процессе работы машина движется вперед на рабочей скорости. При этом отвал скользит по поверхности или принудительно заглубляется в грунт, срезает кусты и мелкие деревья, которые отодвигаются боковыми поверхностями отвала в стороны. Для защиты от возможного падения деревьев силовая установка и кабина защищены каркасом 6. В зависимости от местных условий выполняют повторный проход по прежнему следу или переходят на смежную полосу. На коротких захватках обычно работают по челночной схеме: рабочее движение осуществляют передним ходом, а возврат на исходную позицию — задним ходом. На длинных захватках производительнее двигаться в прямом и обратном направлениях в рабочем режиме с разворотами машины на концах захватки.
Корчеватель-собиратель(см. рис. 18.1, б) отличается от кустореза рабочим оборудованием — отвалом 7 с зубьями 8 в его нижней части. При работе отвал опускают на грунт, и машина, перемещаясь вперед на рабочей скорости с одновременным заглублением отвала, погружает средние зубья под пень, выдергивая его из земли целиком или частично после нескольких попыток. У некоторых моделей этих машин отвал может поворачиваться относительно рамы в вертикальной плоскости с помощью дополнительных гидроцилиндров, чем облегчается его разгрузка, а при корчевке пней обеспечивается хорошая избирательная способность по направлениям прилагаемых к пню усилий. Сопротивление пней корчеванию находится в прямой зависимости от диаметра пня и составляет от 18…20 до 180…210 кН при диаметрах от 100 до 500 мм соответственно. Полное тяговое усилие корчевателя в рабочем режиме складывается из усилий корчевания, сопутствующего ему разрыхления грунта и самопередвижения.
Производительность корчевателей и кусторезов при сплошной расчистке определяют по формулам (16.1) — (16.3) производительности бульдозеров на планировочных работах, а при избирательной расчистке ее определяют по площади отдельно расчищенных участков с учетом потерь времени на перегоны машины от одного участка к другому.
Машины и оборудование для разработки мерзлых
Грунтов
При продолжительности зимнего периода от трех до семи месяцев грунт промерзает на глубину 1 …2,5 м. Многолетнемерзлые грунты и грунты сезонного промерзания покрывают более 90 % территории России. Годовой объем разрабатываемых в нашей стране мерзлых грунтов составляет около 1 млрд м3. Для непосредственной разработки мерзлых грунтов применяют некоторые модели
траншейных экскаваторов, одноковшовых канатных экскаваторов с ковшами активного действия, зубья которых работают независимо от движения ковша в ударном, виброударном или в вибрационном режимах, гидравлические экскаваторы, оснащенные однозубыми рыхлителями или гидромолотами, землеройно-фре-зерные машин для послойной разработки мерзлых грунтов при строительстве дорог.
Мерзлые грунты, обладающие повышенной прочностью и аб-разивностью по сравнению с грунтами немерзлого состояния, разрабатывают преимущественно в два этапа: сначала предварительно их разрыхляют, а затем перемещают или погружают в транспортные средства экскаваторами, бульдозерами и погрузчиками — общего назначения или модифицированными для работы в условиях низких температур. Наибольшее распространение в строительстве получили способы механического разрыхления и взрыва.
Для разрушения мерзлых фунтов с промерзанием на глубину до 0,5…0,7 м применяют специальные снаряды в виде шар-молотов (рис. 18.2, а) массой 500 кг и более и клин-молотов (рис. 18.2, б и в) массой 2000…3000 кг, подвешиваемые на канатах фузовых лебедок гусеничных кранов и экскаваторов с крановым оборудованием. Снаряд поднимают лебедкой на высоту 6…8 м и сбрасывают его на разрабатываемый грунт. Известны также специальные машины на базе гусеничного трактора, в которых вертикально перемещающийся снаряд движется в трубе.
Способ разрушения мерзлых фунтов свободно падающим снарядом хотя и является наиболее простым, все же широкого распространения не получил из-за низкой производительности (4…10 м3/ч), а также из-за повышенных динамических нафузок, вредно воздействующих как на базовую машину, так и на близко расположенные коммуникации и сооружения. В настоящее время для подготовки к эк-скавации больших площадей и объемов мерзлых фунтов наиболее часто применяют навесные рыхлители и щеленарезные машины.
| Рис. 18.2. Сменное оборудование для разработки мерзлых фунтов: а — шар-молот; 6 — клин-молот; в — клин-молот с зубьями |
Рыхлители (рис. 18.3) применяют для послойной разработки прочных грунтов, включая мерзлые, многолетнемерзлые и скальные, с последующей уборкой землеройно-транспортными или погрузочными машинами. Их применяют при рытье котлованов и широких траншей, устройстве выемок в гидротехничес-
ком строительстве, корыт под дорожное полотно, разработке мерзлых россыпей полезных ископаемых, на вскрышных работах.
| Рис. 18.3. Схемы навески рыхли-тельного рабочего оборудования |
Различают основные и вспомогательные рыхлители. Основные рыхлители изготавливают как навесное оборудование к гусеничным или пневмоколесным тракторам, а вспомогательные агрегатируют с основным оборудованием ЗТМ и погрузчиков для рыхления плотных фунтов и слежавшихся материалов. Вспомогательные рыхлители позволяют повысить производительность и расширить область применения основного рабочего оборудования. Сменным рыхлительным оборудованием оснащают универсальные строительные гидравлические экскаваторы. В строительстве применяют также бульдозеры-рьоогители (см. рис. 16.6), у которых в равной мере используют как бульдозерное, так и рыхлительное рабочее оборудование. Эффективность работы основных рыхлителей зависит от тягово-сцепных свойств базовых тракторов. Наиболее выгодно их использовать для разработки многолет-немерзлых фунтов, трещиноватых и выветренных слоистых или низкопрочных горных пород (сланцев, ракушечников, бурых углей, апатитов, фосфоритов, песчаников, легких и средних известняков и т. п.).
Как основные, так и вспомогательные рыхлители оборудуют одним или несколькими зубьями 6 (см. рис. 18.3, а), устанавливаемыми на поперечной балке 2 жестко или с возможностью незначительных угловых перемещений в плане через поворотные кронштейны 5, закрепленные на балке шарнирно. При трех зубьях их располагают на одной балке в ряд, при пяти зубьях — в два ряда по шахматной схеме. Зубья с поперечной балкой навешивают на базовый фактор через стойку 3 по схеме трехточечной или четырехточечной (параллелограммной) (см. рис. 18.3, б) подвесок, регулируя глубину пофужения зубьев одним или двумя гидроцилиндрами 4 (см. рис. 18.3, а). Параллелофаммная подвеска обеспечивает постоянство угла резания независимо от глубины пофужения зубьев, что по сравнению с фехточечной подвеской позволяет снизить рабочие сопротивления на зубьях, повысить производительность рыхлителя и увеличить срок службы сменных наконечников зубьев 1. Разрыхляют фунт заглубленными в него зубьями тяговым усилием перемещающегося на рабочей скорости трактора. Форма попе-
| Рис. 18.4. Поперечное сечение выемки после проходки рыхлителя |
речного сечения, образованного после проходки рыхлителя выемки, приведена на рис. 18.4. Для работы в плотных фунтах выгоднее использовать однозубые рыхлители с жестким креплением зуба на поперечной балке, которые по сравнению с многозубы-
ми рыхлителями реализуют большие усилия на одном зубе. С этой же целью в тех же условиях многозубые рыхлители переоборудуют в однозубые или снабжают их буферными устройствами, устанавливаемыми в верхней части среднего зуба, для работы с трактором-толкачом, также оборудованным буферным устройством в его передней части. При разработке слоистых горных пород и вялых пластично-мерзлых грунтов, а также рыхления корки мерзлого фунта на зубья устанавливают уширители, благодаря чему увеличивается ширина рыхления за каждый проход и повышается производительность машины. Отдельные модели рыхлителей оборудуют дистанционными системами регулирования угла резания и изменения вылета зуба для выбора оптимального в конкретных условиях режима работы рыхлителя.
Техническая производительность рыхлителя
Пт = 3600 В h
где Пт — техническая производительность, м3/ч; В — средняя ширина полосы рыхления за один проход при многозубом рыхлителе (см. рис. 18.4) или между двумя смежными проходами при од-нозубом рабочем органе, м; Аэф — эффективная глубина рыхления (до вершин гребешков ненарушенного массива), м; L— длина пути рыхления, м; /ц — продолжительность рабочего цикла, с. Обычно Аэф = (0,6…0,8)й (А — средняя глубина погружения зубьев в фунт).
Продолжительность рабочего цикла определяют следующим образом:
при разработке фунта продольными проходками с разворотами на концах захваток
/ц = 3,6L/vp tn ty; при работе по челночной схеме
Гц = 3,6Z,(l/4
L,
где 1>р и v.
— скорости соответственно рабочая и при движении задним ходом, км/ч (для тракторов с гидромеханическими передачами vp= 1,7…3,2 км/ч; v3x = 7,5… 14,5 км/ч; с механическими — г>р = 2,35…3,2 км/ч; v3X = 7,6…8,5 км/ч); /п и /у — продол-
жительности поворота для движения в обратном направлении и управления, с. Продолжительность поворота определяют расчетом в зависимости от ситуационных условий, а продолжительность управления ty= 7… 8 с.
При разработке высокопрочных грунтов перекрестным способом (в двух взаимно перпендикулярных направлениях) производительность определяют раздельно для продольных и поперечных проходов, а затем находят ее среднее значение.
Повысить производительность рыхлителя и улучшить его тяго-во-сцепные свойства можно за счет рационального выбора направления рабочего движения под уклон, резервирования части неубранного после предшествующих проходок грунта или породы слоем 5…7 см, удаления снежного покрова перед разрыхлением мерзлых фунтов для улучшения сцепления движителя, совместной работы с тракторами-толкачами. В последнем случае энергозатраты увеличиваются примерно в 2 раза, а производительность — в 3 — 4 раза.
| Рис. 18.5. Двухбаровая щеленарезная машина |
Из щеленарезных машиннаибольшее распространение в строительстве получили баровые машины (рис. 18.5), рабочее оборудование которых состоит из одного или двух цепных баров / врубовых машин, приводимых в движение через механическую трансмиссию от двигателя базового гусеничного трактора 3. В рабочее положение и обратно бары переводятся гидроцилиндрами 2. Баровые цепи, оснащенные резцами, прорезают в фунте щели шириной 0,14 м глубиной до 2 м. Оконтуренные с двух сторон прорезанными щелями полосы фунта разрабатываются затем одноковшовыми экскаваторами

или экскаваторами непрерывного действия. Рабочая скорость дви-! жения машины при глубине промерзания до 1 м — около 60 м/ч.
Контрольные вопросы
1. Перечислите виды подготовительных работ. Какие машины исполь
зуют для их выполнения?
2. Для чего предназначены, как устроены и как работают кусторезы?
Как определяют их производительность?
3. Для чего предназначены, как устроены и как работают корчевате
ли-собиратели? Как определяют их производительность?
4. Какими машинами разрабатывают мерзлые грунты непосредствен
но?
5. Какие машины и оборудование применяют для предварительного
разрушения (разрыхления) мерзлых грунтов?
6. Опишите способ разрушения мерзлых грунтов падающими снаря
дами. Каковы достоинства и недостатки этого способа?
7. Для чего предназначены рыхлители? Чем отличаются основные
рыхлители от вспомогательных? Как устроены и как работают основные
рыхлители? В каких случаях выгоднее использовать однозубые рыхлите
ли? Какими другими мерами можно повысить эффективность работы
рыхлителей? Как определяют техническую производительность рыхли
телей?
8. Для чего применяют баровые машины? Как они устроены и как
работают?
Глава 19. МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ УПЛОТНЕНИЯ ГРУНТОВ
19.1. Общие сведения
Для обеспечения устойчивости зданий и сооружений в течение всего срока их эксплуатации фунты, на которых их возводят, должны обладать достаточной плотностью, регламентированной СНиП и другими нормативными документами. Просадочные и насыпные фунты перед возведением на них зданий и сооружений подлежат искусственному уплотнению.
Уплотнение грунта — это процесс его необратимого деформирования путем внешнего силового воздействия, в том числе за счет гравитационных сил, в результате которого определенная масса фунта уменьшается в объеме путем удаления из его пор свободной воды и воздуха, а его плотность повышается. При этом вода и воздух частично выходят на поверхность и частично перемещаются в грунте из более напряженных зон в менее напряженные, в связи с чем требуемая плотность достигается многократным повторным нафужением. При этом наибольшая степень уплотнения достигается на первых циклах нагружения, которая уменьшается к концу этого процесса.
Разрыхление грунта перед его уплотнением способствует выходу воздуха и свободной воды на поверхность без миграции этих компонентов в фунтовом массиве, благодаря чему требуемая плотность грунта может быть достигнута меньшим числом повторных нагружений. По этой причине большинство способов уплотнения грунта являются двухэтапными, включающими разрыхление уплотняемого слоя и собственно его уплотнение.
Степень уплотнения фунтов оценивают коэффициентом уплотнения, равным отношению фактической (или требуемой) плотности к ее максимальному стандартному значению, определяемому на специальном приборе. В зависимости от ответственности земляного сооружения коэффициент уплотнения назначают из пределов от 0,9 до 1.
Все процессы уплотнения грунтов в строительстве полностью механизированы. Их выполняют с помощью машин и оборудования, классифицируемых по характеру силового воздействия на фунт и по способу перемещения рабочего органа относительно уплотняемой зоны грунта. По первому признаку различают маши-
ны статического (укаткой), динамического (трамбованием и вибротрамбованием) и комбинированного действия. При трамбовании грунт уплотняется падающей массой. Виброуплотнение заключается в сообщении грунту колебательного движения, которое приводит к относительному смещению его частиц и более плотной их упаковке. При виброуплотнении рабочий орган вибратора, находящийся на поверхности грунта, колеблется вместе с фунтом. Если возмущения превзойдут определенный предел, то виброуплотнение преобразуется в вибротрамбование с отрывом рабочего органа вибратора от грунта и частыми ударами по нему. Разновидностью виброуплотнения является его комбинация с укаткой, для чего перекатываемому по грунту катку сообщают направленные вертикальные колебания.
По способу перемещения рабочего органа относительно уплотняемой зоны фунта различают самоходные машины, прицепные и полуприцепные орудия, перемещаемые за тягачом (все виды катков), машины с навесными рабочими органами (трамбовочные и вибротрамбовочные) и оборудование, перемещаемое за счет импульсных реактивных сил в результате наклонного силового воздействия на грунт (виброплиты).
Поскольку после каждой очередной проходки грунтоуплотня-ющей машины предел прочности грунта на его поверхности возрастает, то для повышения эффективности процесса целесообразно контактные давления увеличивать от прохода к проходу (для катков) или от удара к удару (для фамбующих машин). Для этого рекомендуется двухстадийное уплотнение: предварительное — легкой машиной, окончательное — тяжелой. При этом общее число проходов или ударов по одному месту может быть уменьшено в среднем на 25 % с сокращением стоимости работ до 30 %, в том числе и за счет частичной замены тяжелых машин легкими.
19.2. Прицепные катки статического действия
Для уплотнения грунтов укаткой применяют прицепные, полуприцепные и самоходные катки с гладкими, кулачковыми и решетчатыми вальцами, а также пневмокатки. Их используют также в Дорожном, аэродромном строительстве и подобных отраслях строительства для уплотнения подстилающего слоя и укатки дорожного покрытия из асфальтобетона и других материалов.
Прицепной каток с металлическими вальцами(рис. 19.1) состоит из пустотелого вальца 5 цилиндрической формы и охватывающей его рамы 3 с дышлом 2 и сцепным устройством 1 на его конце. Валец соединен с рамой через подшипники 4 на торцовых шипах. Для увеличения массы катка и, следовательно, повышения давления на укатываемую поверхность валец зафужают (балластируют) песком через люк 7. Вальцы бывают гладкими (см. рис. 19.1, а)
 ‘//////// У// /// /// ///
‘//////// У// /// /// ///
а
Рис. 19.1. Прицепные катки с металлическими вальцами (а и б) и схема соединения катков для работы в сцепе (в)
или с установленными на их рабочей поверхности в шахматном порядке кулачками 9 (см. рис. 19.1, б) (кулачковые вальцы), которые приваривают непосредственно к обечайке вальца или к полубандажам 8. От налипшего на рабочую поверхность грунта гладкие вальцы очищают скребком 6, закрепленным на раме, а междурядья кулачков — штырями, собранными на общей балке, прикрепленной к раме вместо скребка.
Прицепные катки с металлическими вальцами перемещают по уплотняемой поверхности за тягачом, обычно трактором, с разворотами на концах захваток для возвратного движения или челночным способом, для чего тягач перецепляют на противоположную сторону катка. Для укатки грунтов на обширных площадях используют сцепы из 2…5 катков и более, объединенных траверсами (см. рис. 19.1,в).
Гладкие каткиуплотняют грунт слоями 0,15… 0,2 м без разрыхления его поверхности или с незначительным разрыхлением на глубину 1…3 см (в несвязных фунтах). Их применяют преимущественно для прикатки в 1 …2 прохода поверхностей, уплотненных другими катками. Скорости передвижения катков не влияют на изменение плотности фунтов, но при повышенных скоростях из-за больших сдвигающих усилий на контактной поверхности формируется менее прочная структура грунта. Рациональные скорости перемещения гладких катков составляют 1,5…2,5 км/ч на первом и двух последних проходах и 8… 10 км/ч на промежуточных проходах. По сравнению с работой в односкоростном режиме производительность катков при этом увеличивается примерно в 2 раза.
Кулачковые каткиуплотняют фунт внедряемыми в него кулачками, а на первых проходах также поверхностью вальца. По мере уплотнения грунта кулачками на глубине при каждом новом проходе их пофужение в фунт уменьшается, вследствие чего валец
теряет контакт с уплотняемой поверхностью. Из-за высоких контактных давлений в конце уплотнения кулачки будут немного погружены в фунт, вследствие чего на его поверхности останется разрыхленный слой, который при необходимости прикатывают гладкими вальцами.
В отличие от работы гладких катков, когда от прохода к проходу уплотненный слой наращивается от поверхности вглубь, кулачки начинают уплотнение на глубине, наращивая его в направлении к поверхности. Кулачковые катки применяют только для уплотнения рыхлых связных грунтов. При уплотнении ими несвязных и малосвязных грунтов происходит выброс фунта кулачками вверх и в стороны, вследствие чего практически невозможно достигнуть требуемой плотности.
Решетчатые катки(рис. 19.2) с обечайками, изготовленными из прутков в виде решетки с квадратными ячейками, работают подобно кулачковым каткам. Внедряясь в грунт прутками, решетчатые катки уплотняют его, начиная с глубинных слоев. Их применяют для уплотнения комковатых и переувлажненных связных грунтов, включая разрыхленные мерзлые и скальные крупнообломочные грунты.
Прицепной пневмоколесный каток(рис. 19.3, а и б) состоит из рамы 3 с дышлом 2 и сцепным устройством 1 для соединения с тягачом (трактором или автомобилем), четырех-пяти пневматических колес 5, соединенных с рамой одной осью (см. рис. 19.3, а) или через балансиры (рис. 19.3, 5) и одного 4 или нескольких 7 (по числу колес) балластных ящиков. В последнем случае балластные ящики соединены между собой передней 6 и задней 8 поперечными балками, а ось каждого колеса крепится к днищу соответствующего балластного ящика так, что в зависимости от неровностей укатываемой поверхности с фунтом контактируют все колеса катка (рис. 19.3, в).
| Рис. 19.2. Решетчатый каток |
Пневмоколесные катки применяют для уплотнения как фунтов, так и фавийных и щебеночных оснований, а также черных смесей асфальтобетона. Преимуществом этих катков перед катками с металлическими вальцами является то, что при укатке камен-
1S7
| ‘ УУУ УУУ УУУ УУУ УУУ УУУ УУУ УУУ УУУ УУУ ХУУ УУУ УУУ УУУ УУУ УУУ УУУ УУУ УУУ УУУ УУУ |
| УУУ УУУ УУУ УУУ УУУ УУУ УУУ УУУ УУУ У, |
| vууууууууууууууууууууууууууууууууууууууууууууууууууууууу vуууууууу^уууу/у#7^4v»yyy/у/у/у///, б |
Рис. 19.3. Прицепные пневмокатки (а и б) и схема перекатывания колес с независимой подвеской по неровностям
поверхности грунта (в)
ных материалов они не измельчают их. Требуемая степень уплотнения достигается за 5… 10 проходов при рабочих скоростях передвижения 11…15 км/ч. Для уплотнения грунтов более эффективны шины большого диаметра с большей допустимой нагрузкой на каждую шину. Катки с автомобильными шинами используют, в основном, для уплотнения малосвязных и среднесвязных грунтов, а с авиационными шинами повышенного давления — для уплотнения тяжелых суглинков и глин высокой связности.
19.3. Полуприцепные, самоходные и комбинированные катки
Полуприцепные (седельные) катки(рис. 19.4) агрегатируют с колесными тракторами и одноосными тягачами. Рабочее оборудование этих катков полностью унифицировано с прицепными катками соответствующего типоразмера и отличается от последнего опирающейся на седельное устройство тягача хребтовой балкой вместо дышла. Отечественная промышленность производит полуприцепные катки трех типоразмеров: легкие, средние и тяжелые массой соответственно 15±3, 30±6 и 45±9 т. Они отличаются хорошей маневренностью и транспортабельностью, высокими качеством уплотнения и высокой производительностью.
| Рис. 19.4. Полуприцепной пневмокаток |
Самоходные пневмоколесные каткиприменяют для уплотнения грунтов и покрытий дорог. Их разделяют по массе на легкие (10… 15 т), средние (20…30 т) и тяжелые (40…50 т). На этих катках устанавливают четыре задних и три передних колеса, располагая их в плане в шахматном порядке для перекрытия смежных уплотняемых полос. На катках, работающих на укатке черных асфальтобетонных покрытий, устанавливают шины с гладким протектором и пневматические распылители воды для смачивания и охлаждения шин.

Jlilllli
| Рис. 19.5. Комбинированный самоходный каток с кулачковым вальцом |
Основным направлением в развитии прогрессивных универсальных самоходных катков явилось создание гаммы комбинированных катковна базе унифицированных модулей: силовой установки с дизелем и насосной станцией, кабины с органами управления и двух шарнирно сочлененных рам. Ходовые устройства состоят из ведущего моста с пневмоколе-сами и уплотняющего катка —
с гладкими вальцами, кулачкового или решетчатого. На рис. 19.5 показан комбинированный каток с кулачковым вальцом.
§
К этой группе грунтоуплотняющих технических средств относятся трамбовочные и вибротрамбовочные машины, виброплиты и виброкатки.
Трамбующие рабочие органыв виде чугунных или железобетонных плит круглой или квадратной формы навешивают на экскаваторы или специально приспособленные для этого машины. В первом случае в качестве базовой машины используют одноковшовый экскаватор со стрелой драглайна, к подъемному канату которого подвешивают плиту массой 0,8… 1,5 т с площадью опорной поверхности около 1 м2. Вспомогательным канатом с легким оттяжным грузом предупреждают закручивание основного каната. Плиту поднимают на высоту 1,2…2 м, с которой ее сбрасывают отключением от трансмиссии барабана подъемной лебедки. Тремя — шестью ударами плиты о грунт достигают его уплотнения на глубину 0,8… 1,5 м. Продолжительность рабочего цикла с учетом поворотных движений экскаватора в плане составляет примерно 12…20 с, что определяет невысокую производительность этого способа.
Описанный способ уплотнения грунтов отличается своей простотой. Однако, использование экскаваторов для уплотнения грунтов экономически невыгодно вследствие высокой стоимости этих машин, а также из-за повышенного износа подъемного и передающих механизмов в описанном режиме нагружения. Поэтому описанный способ уплотнения грунтов имеет ограниченное применение: в местах, труднодоступных для других грунтоуплотняющих машин.
Самоходные трамбующие машинына базе гусеничного трактора (рис. 19.6) используют для уплотнения грунтов на объектах с ши-
Рис. 19.6. Самоходная трамбовочная машина
роким фронтом работ. На машине установлены две перемещающиеся по направляющим чугунные плиты массой 1,3 т каждая, которые поочередно поднимаются и падают на уплотняемую поверхность при непрерывном передвижении базового трактора. В зависимости от содержания в фунте глинистых частиц уплотнение фунта на глубину до 1,2 м достигается за 3…6 ударов плиты по одному месту при скорости передвижения трактора 160…320 м/ч.
Виброплиты применяют для уплотнения несвязных и слабосвязных фунтов на офаниченных поверхностях. Грунт уплотняют плитой-поддоном / (рис. 19.7, а и б), которому сообщаются колебания от двухдебалансного вибратора 2, принцип действия которого показан на рис. 19.8. При вращении дебаланса массой т с угловой скоростью о и смещении центра масс от оси вращения {эксцентриситете) г центробежная сила составит Р = т(я2г. Равнодействующая Q = 2PCOSO)? центробежных сил двух противоположно вращающихся дебалансов с одинаковыми другими параметрами будет направлена перпендикулярно оси, соединяющей центры вращения дебалансов. Из этого следует, что вынуждающая сила изменяется во времени гармонически с наибольшими модульными значениями (амплитудой) q=2P при / = = 7с/ (где j — целое число).
| Рис. 19.7. Одномассная (а) и двухмассная {б) виброплиты и схема перемещения виброплиты (в) |
Вибратор обычно устанавливают на поддоне, а приводящий его Двигатель 3 (см. рис. 19.7, б) или На том же поддоне, или на специальном подрамнике 4, опираю-

щемся на поддон через пружины 5 или резиновые амортизаторы. Первую схему называют одномассной, а вторую — двухмассной. Благодаря мягкой подвеске верхняя часть двухмассной виброплиты не участвует в колебаниях, но воздействует на грунт своей силой тяжести. В результате создаются благоприятные условия для работы двигателя.
| Рис. 19.8. Принцип действия вибратора направленных колебаний |
При одномассной виброплите вибратор устанавливают на поддоне шарнирно (рис. 19.7, в) с возможностью его отклонения вручную. При наклоне вибратора на угол а от вертикали (в случае работы на горизонтальной поверхности) возникает горизонтальная составляющая вынуждающей силы Qx = Q sin ос. Если эта составляющая превзойдет сопротивление сил передвижению, то плита начнет перемещаться в направлении отклонения вибратора от вертикали (когда вектор силы Q будет направлен вверх — при его нижнем направлении увеличиваются сопротивления передвижению). Управляет виброплитой оператор с помощью рычагов, установленных на дышле, которое соединено с виброплитой также через амортизаторы. Направление самопередвижения виброплиты изменяют поворотом дышла. Современные виброплиты производительностью 300…900 м3/ч массой 150… 1400 кг уплотняют грунт на глубину 0,3… 1 м.
Навесное вибро-трамбовочное оборудование(рис. 19.9) устанавливают на самоходной машине на базе гусеничного трактора. Здесь реализуется ударно-вибрационный способ уплотнения грунтов. Рабочее оборудование состоит из двух виброударных рабочих органов, смонтированных на раме 11, способной перемещаться в
 / I
/ I
И ю
Рис. 19.9. Ударно-вибрационная машина
поперечном направлении на 0,5…0,7 м от следа базового трактора для уплотнения грунтов вне полосы его движения, например, в бровочной части дорожной насыпи.
Вертикальные перемещения трамбующей плиты 10 генерируются вибромолотом 5, приводимым гидромотором-редуктором 3 через двухступенчатую клиноременную передачу 4. Вибромолот устроен подобно вибратору направленных колебаний и отличается от него тем, что его корпус перемещается по вертикальным направляющим 6 с пружинами 7. В процессе этих перемещений, вызванных вынужденной силой вращающихся дебалансов, вибромолот ударяет бойком 9 в нижней части своего корпуса по наковальне 8, жестко соединенной с трамбующей плитой 10. Таким образом, трамбующая плита воспринимает ударные нагрузки через наковальню, а вибрационные — через пружины 7 и направляющие 6, сочетая в воздействии на грунт эффект трамбования и виброуплотнения.
Рабочее оборудование устанавливают на раме /, которую через амортизаторы 12 шарнирно крепят на лонжеронах гусеничных тележек базового трактора. Посредством гидроцилиндра 2 рабочее оборудование может быть установлено в рабочее положение или поднято для передвижения машины в транспортном режиме. Ударно-вибрационную машину комплектуют бульдозерным отвалом 14 и планирующей плитой 13 для разравнивания грунта в полосе перемещаемого следом рабочего органа.
Для уплотнения малосвязных грунтов эффективно применять вибрационные каткис гладкими, кулачковыми или решетчатыми вальцами, внутри которых вмонтирован вибратор направленных колебаний, приводимый в движение от автономного двигателя, установленного на раме катка. Эффективность уплотнения достигается совместным действием на грунт гравитационных и вынуждающих сил, генерируемых вибратором, что позволяет получить требуемую плотность грунта при сравнительно меньшей массе катка. Так, при уплотнении песков путем вибрационного воздействия масса катка может быть снижена примерно в 5 раз, при супесях — в 2 раза, а при уплотнении средних и тяжелых суглинков лишь на 10… 30 %. Эффективность вибрационнного воздействия снижается с увеличением содержания в грунте глинистых частиц. Поэтому для уплотнения связных и высокосвязных грунтов требуется применять весьма тяжелые катки.
Контрольные вопросы
1. Для чего уплотняют грунты? Объясните сущность уплотнения. Каким показателем оценивают степень уплотнения? Какими способами уплотняют грунты? Какие машины для этого используют? Для чего применяют двухстадийное уплотнение фунтов легкими и тяжелыми машинами? Оцените его эффективность по сравнению с одностадийным уплотнением тяжелой машиной.
2. Для чего предназначены, как устроены и как работают катки с
металлическими вальцами (гладкими, кулачковыми, решетчатыми)? Чем
отличается уплотнение грунта гладкими и кулачковыми катками?
3. Для чего предназначены, как устроены и как работают прицепные
пневмоколесные катки, полуприцепные пневмоколесные катки, само
ходные пневмоколесные катки? комбинированные катки?
4. Как уплотняют грунты трамбующими плитами, навешиваемыми на
экскаваторы? Каковы достоинства и недостатки этого способа? Каков
принцип действия трамбующих машин?
5. Для чего применяют, как устроены и как работают виброплиты?
Опишите принцип действия вибратора направленных колебаний. Чем
отличаются одномассные виброплиты от двухмассных? Объясните само
передвижение одномассной виброплиты.
6. Для чего предназначена, как устроена и как работает ударно-вибра
ционная машина?
7. Для уплотнения каких грунтов применяют виброкатки? Каким уст
ройством создаются направленные колебания вальца катка? Какой эф
фект достигается совместным действием гравитационных и вынужда
ющих сил?
Глава 20. ТЕХНИЧЕСКИЕ СРЕДСТВА ГИДРОМЕХАНИЗАЦИИ
20.1. Общие сведения
Гидромеханизацией называют способ механизации земляных работ, при котором все или основные технологические процессы выполняются за счет энергии потока воды. Этим способом в гидротехническом строительстве возводят плотины, дамбы и насыпи, разрабатывают котлованы под различные гидротехнические сооружения, каналы, углубляют водоемы, добывают и транспортируют песчано-гравийные материалы.
В оборудовании, реализующем способ гидромеханизации, используют устройства для разрушения фунтов как струей воды, так и механическим путем с последующим транспортированием продуктов разрушения в потоке воды и укладкой в земляное сооружение. При гидравлическом разрушении требуемое давление потока воды создается водяным насосом, а струя формируется и направляется на забой гидромонитором / (рис. 20.1). Размытый грунт вместе с отработавшей водой {пульпа) стекает в специальное углубление (зумпф) 2, откуда грунтовым насосом (землесосом) 3 нагнетается в трубопровод (пульповод) 4 и перемещается по нему к месту укладки. После дренажа воды оставшийся в зоне, ограниченной обвалованием 5, грунт образует тело земляного сооружения 6 или штабель песка, гравия, песчано-гравийной смеси для последующего использования как строительного материала. При организации гидромониторных работ стремятся максимально использовать рельеф местности, который позволяет иногда транспортировать пульпу к месту укладки самотеком по желобам или канавам.

ш 56
Рис. 20.1. Схема гидромониторной разработки фунтов
 Плотные подводные грунты разрабатывают механическим способом с применением рыхлителей 7 (рис. 20.2), перемещая их по грун-тозаборному трубопроводу и пульповоду с помощью грунтового насоса 4. Для этого раму 2 грунтозаборного устройства с рыхлителем закрепляют на понтоне 3, там же устанавливают грунтовый насос. Агрегат, включающий понтон, грунтовый насос и грунтозаборное устройство, называют землесосным снарядом (земснарядом). Пульповод располагают на понтонах 5. Малосвязные грунты увлекаются потоком воды по грунтозаборному устройству без их разрыхления.
Плотные подводные грунты разрабатывают механическим способом с применением рыхлителей 7 (рис. 20.2), перемещая их по грун-тозаборному трубопроводу и пульповоду с помощью грунтового насоса 4. Для этого раму 2 грунтозаборного устройства с рыхлителем закрепляют на понтоне 3, там же устанавливают грунтовый насос. Агрегат, включающий понтон, грунтовый насос и грунтозаборное устройство, называют землесосным снарядом (земснарядом). Пульповод располагают на понтонах 5. Малосвязные грунты увлекаются потоком воды по грунтозаборному устройству без их разрыхления.
Гидромеханический способ разработки грунтов отличается от других способов простотой оборудования. Энергоемкость разработки составляет 2… 5 (кВтч)/м3. Этот способ особенно эффективен при массовых объемах земляных работ. Для его реализации требуется большое количество воды, в связи с чем он применим для разработки грунтов вблизи водоемов, с береговых урезов и со дна водоемов. К его недостаткам относится большая, чем при других способах, зависимость от изменчивости грунтов. Так, при переходе от песков к глинам производительность оборудования гидромеханизации существенно снижается.
| Рис. 20.2. Землесосный снаряд |
Грунты с крупнообломочными включениями и валунами, полускальные породы и другие, для которых гидромониторный раз-
мыв малоэффективен, разрабатывают комбинированными способами. Разрушают грунт землеройными машинами, а транспортируют к месту укладки в потоке воды.
Насосы
В составе оборудования гидромеханизации имеются два вида центробежных насосов: для подачи чистой воды к гидромониторам, откачки воды из скважин и грунтовые для перекачивания пульпы (землесосы).
Центробежные насосыдля подачи чистой воды бывают одноступенчатыми с двусторонним подводом воды к рабочему колесу (подача до 12 500 м3/ч, давление до 1,4 МПа) и двухступенчатыми (подача до 3600 м3/ч, давление до 4,55 МПа).
Грунтовые насосыотличаются от насосов для чистой воды способностью пропускать крупнообломочные включения и абразивные фунтовые частицы. По сравнению с насосами для чистой воды грунтовые насосы обладают более низкой всасывающей способностью, обусловленной большей плотностью пульпы по сравнению с плотностью чистой воды. Их предельная вакуумметри-ческая высота всасывания не превышает 4…6,8 м. Грунтовые насосы развивают давление до 0,8 МПа. При необходимости увеличения напора их устанавливают последовательно, а при недостаточной подаче — параллельно с объединением напорных трубопроводов одним пульповодом. Перекачиваемая грунтовыми насосами пульпа обычно содержит 10… 12% частиц грунта.
При небольших объемах работ, например, на водоотливе при сильно загрязненной воде, когда нельзя применить обычные водяные насосы, а установка грунтового насоса нецелесообразна, используют гидроэлеваторы(струйные насосы). Последние представляют собой аппараты для перекачивания пульпы за счет энергии водяной струи, подаваемой внешним водяным насосом. Вода поступает через насадку 1 (рис. 20.3) в камеру 2 и далее, через горловину 4, в диффузор 5. При движении водяной струи с большой скоростью в камере обра-
| Рис. 20.3. Принципиальная схема работы гидроэлеватора |
 зуется вакуум, вследствие чего в нее по трубопроводу 3, опущенному в водоем (резервуар), всасывается пульпа и увлекается струей в диффузор, где скорость потока снижается с преобразованием его кинетической энергии в потенциальную энергию давления, которая обеспечивает перемещение смеси по транспортному трубопроводу.
зуется вакуум, вследствие чего в нее по трубопроводу 3, опущенному в водоем (резервуар), всасывается пульпа и увлекается струей в диффузор, где скорость потока снижается с преобразованием его кинетической энергии в потенциальную энергию давления, которая обеспечивает перемещение смеси по транспортному трубопроводу.
 Гидроэлеваторы просты по конструкции, но имеют весьма низкий КПД, стремительно снижающийся с увеличением дальности транспортирования, в связи с чем ее предельные значения не превышают 25…35 м.
Гидроэлеваторы просты по конструкции, но имеют весьма низкий КПД, стремительно снижающийся с увеличением дальности транспортирования, в связи с чем ее предельные значения не превышают 25…35 м.
Гидромониторы
Гидромониторами называют аппараты для формирования и направления водяной струи. Они бывают низконапорными (давление до 1… 1,2 МПа) и высоконапорными (более 1,2 МПа). Управляют гидромонитором вручную рычагом, установленным на его стволе, или дистанционно. В строительной гидромеханизации применяют, в основном, гидромониторы на салазках, перемещаемые в забое лебедками, тракторами или вручную. Известны также самоходные гидромониторы на гусеничном ходу.
Гидромонитор (рис. 20.4) состоит из установленных на салазках 6 нижнего 1 и верхнего 2 колен, ствола 4 и насадки 5. Колена соединены между собой горизонтальным шарниром для поворота верхнего колена относительно нижнего в плане, а верхнее колено со стволом — шаровым шарниром 3 для установки ствола в нужном как горизонтальном, так и вертикальном направлениях. Нижнее колено соединяется с водоводом для подачи воды от насосной установки. Для компактного формирования струи насадка сужается к выходному концу. Для направления струи без ее вращения внутренняя поверхность ствола имеет продольные ребра.
Эффективность работы гидромонитора зависит от размывающей способности струи, характеризуемой давлением на забой, зависящим от давления струи на выходе из насадки, площади поперечного сечения последней, расстояния от насадки до забоя. Чем ближе насадка к забою, тем выше давление струи. Однако, из-за опасности завала обрушающимся грунтом гидромонитор,

особенно с ручным управлением, приходится располагать от забоя на расстояниях, менее эффективных для размыва грунта. Производительность гидромонитора определяют по расходу воды:
где QrM — производительность гидромонитора, м3/ч; i — 0,9…0,93 — коэффициент расхода; ю — площадь поперечного сечения насадки, м2; g — ускорение свободного падения, м/с2; Н — напор воды у насадки, м.
20.4. Землесосные снаряды
Землесосными снарядами (см. рис. 20.2) называют плавучие установки, предназначенные для извлечения грунта из-под воды и перекачивания его в смеси с водой к месту укладки.
В гидротехническом строительстве земснарядами разрабатывают котлованы под гидротехнические сооружения, возводят плотины и другие насыпи, разрабатывают песчано-гравийные месторождения. Строительные земснаряды не приспособлены для работы на судоходных фарватерах и чаще всего не имеют автономных силовых установок. Они питаются чаше электроэнергией от внешней электросети. При смене строительного объекта земснаряд перемещают по воде буксиром. Автономными силовыми установками оборудованы земснаряды, часто меняющие строительные объекты. Для возможности перебазирования по суше и связанного с этим частого монтажа и демонтажа корпуса земснарядов делают сборно-разборными из отдельных понтонов и секций, способных самостоятельно удерживаться на плаву.
Основными параметрами земснаряда являются: его производительность по грунту, напор, который способен развивать грунтовый насос, определяющий дальность транспортирования пульпы, и максимальная глубина забора грунта. Кроме того, земснаряд характеризуется размерами корпуса судна, его полным водоизмещением и осадкой, шириной полосы, в пределах которой разрабатывается грунт, общей потребляемой мощностью и ее составляющими, тяговым усилием и скоростями папильонирова-ния. В индексе земснаряда указывают его условную производительность по грунту, примерно равную 1/10 производительности грунтового насоса по пульпе, и через дефис полный напор, развиваемый грунтовым насосом, за вычетом гидравлических потерь в пределах земснаряда. Например, земснаряд 500-60 обеспечивает условную производительность по грунту 500 м3/ч (5000 м3/ч по пульпе) при давлении до 0,6 МПа.
Грунтозаборные устройства устанавливают на нижнем конце рамы 2 (см. рис. 20.2), шарнирно соединенной с понтоном 3, и
подвешенной на полиспасте подъемной лебедки. При разработке слабых фунтов без предварительного рыхления нижний конец грунтовода в виде трубы, уложенной на раме и соединенной с всасывающим патрубком грунтового насоса, снабжают наконечниками различной формы (рис. 20.5), преимущественно круглыми, реже эллиптическими. Щелевидные наконечники применяют для дноуглубительных траншейных работ.
| Рис. 20.5. Всасывающие наконечники грунтозаборных устройств: а — круглые; 6 — эллиптические; в — щелевидные |
Так, для механического рыхления плотных грунтов на конце стрелы устанавливают фрезы / (см. рис. 20.2) вращательного действия с приводом от общего двигателя или индивидуально электродвигателем, установленным на подъемной раме в ее верхней части. Известны также приводы фрезы гидромоторами, установленными под водой в нижней части рамы.
В процессе разработки грунта земснарядом нижний конец грун-тозаборного устройства непрерывно перемещается по дну водоема, оставляя после себя выработку в виде узкой полосы. Эти перемещения (папильонирование) осуществляются перемещениями всего земснаряда в определенном порядке.
Перемещение земснаряда при папильонировании обеспечивается работой только папильонажных лебедок, расположенных в носовой и кормовой частях земснаряда (канатное папильонирование) (рис. 20.6, а), или одновременной работой лебедок и двух свай, расположенных за кормой (свайное папильонирование) (рис. 20.6, б). В первом случае в продольном направлении земснаряд подтягивается на заякоренном перед ним канате становой лебедки, а поперечные перемещения обеспечиваются носовыми лебедками при фиксированном кормовыми лебедками центре вращения. Из-за неравномерности сопротивлений папильонажным перемещениям при канатном папильонировании не удается добиться четкого направления перемещения грунтозаборного устройства. Лучшие результаты дает свайное папильонирование с применением так называемого аппарата свайного хода. Для этого земснаряд оборудуют двумя трубчатыми сваями 6 (см. рис. 20.2) с массивными заостренными нижними наконечниками. Сваи устанавливают в направляющих за кормой. Свайное папильонирование заключается в попеременном
Рис. 20.6. Схемы рабочих перемещений земснаряда: а — канатное папильонирование; б — свайное папильонирование
вращении земснаряда папильонажными лебедками относительно одной из опущенных на дно водоема свай (см. рис. 20.6, б). При этом вторая свая находится в поднятом положении. В конце поворотного хода положения свай меняют и папильонируют в обратном направлении. Сваи поднимают лебедками.
Производительность земснаряда по пульпе определяют по подаче грунтового насоса QH, а для ее перевода в производительность по грунту, приведенному к состоянию естественного залегания, пользуются формулой:
По = QHk,
где к = с/( с) — коэффициент, учитывающий консистенцию пульпы с. Последнюю определяют отношением объема грунта, приведенного к естественному состоянию, к объему воды в определенном объеме пульпы, обычно с = 0,1 …0,12.
Для более полной эксплуатационной характеристики земснаряда вместе с его производительностью приводят дальность транспортирования пульпы.
Контрольные вопросы
1. Что такое гидромеханизация? Какие работы выполняют этим способом? Как разрушают грунт способом гидромеханизации? Опишите комплексно схему работ при разработке грунтов способом гидромеханизации. Как разрабатывают подводные грунты? Что такое комбинированный способ разработки фунтов?
2. Какие насосы используют в устройствах гидромеханической разра
ботки грунтов? Чем отличаются грунтовые насосы от насосов для подачи
чистой воды? Назовите их основные параметры. Для чего применяют
струйные элеваторы, каков принцип их действия?
3. Для чего предназначены, как устроены и как работают гидромони
торы? От чего зависит размывающая способность водяной струи? Как
она реализуется на практике? Как определяют производительность гид
ромонитора?
4. Для чего применяют земснаряды, как они устроены и как работа
ют? Какой вид энергии они используют? Как перебазируют земснаряды
при смене объектов по воде и по суше? Назовите основные параметры
земснарядов. Опишите процесс папильонажных перемещений бессвай
ных и свайных земснарядов.
5. Как определяют производительность земснарядов?
Глава 21. МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ПОГРУЖЕНИЯ СВАЙ
21.1. Способы устройства свайных фундаментов
Для устройства свайных фундаментов применяют забивные, винтовые и набивные сваи. Два первых типа свай изготавливают на заводах, а третий изготавливают на месте из монолитного железобетона или в сочетании со сборными элементами заводского изготовления.
В настоящее время на стройках России массовое применение (более 90 % от общего объема свай) получили забивные сваи квадратного сечения от 0,2×0,2 м до 0,4×0,4 м длиной до 20 м. Используются также винтовые металлические сваи, в частности, для за-анкеривания трубопроводов, укладываемых в болотистый грунт; в качестве инвентарных анкерных устройств для стендовых испытаний конструкций на статические нагрузки и т.п. За рубежом свайные фундаменты изготавливают преимущественно буронабив-ным способом, который и в нашей стране начинает находить все более широкое применение. Забивные сваи погружают в грунт, и в зависимости от их ориентации, прикладывают к ним внешнюю вертикальную или наклонную нагрузку. Винтовые сваи погружают в грунт, используя для этого сочетание вертикальной нагрузки с крутящим моментом относительно оси сваи.
Забивные сваипогружают в грунт посредством свайных молотов (ударной нагрузкой), с помощью вибропогружателей (вибрированием) и сочетанием этих способов — вибромолотами. Реже в наиболее податливые глинистые и супесчаные грунты текучей и текучепластической консистенции забивные сваи погружают вдавливанием с пригрузкой вдавливающего оборудования тяжелыми тракторами, которые наезжают на специальные откидные рамы, связанные с направляющей мачтой. По сравнению с ударным способом вибропогружением можно повысить производительность труда в 2,5—3 раза при одновременном снижении стоимости работ в 1,2—2 раза.
Существует два способа погружения свай: копровый и бескопровый. Способ бескопрового погружения свай применяют при погружении пирамидальных, суживающихся книзу свай. Для этого ямобуром / (рис. 21.1, а) отрывают лидерную скважину глубиной, примерно равной 1/4 длины погружаемой сваи. Далее специ-


Рис. 21.1. Последовательность операций бескопрового погружения пирамидальных свай
альный наголовник 4 (рис. 21.1, б), подвешенный к крюку крана, закрепляют на погружателе 3, вместе с ним подводят к голове сваи и закрепляют на ней конический хвостовик наголовника 5. Краном поднимают сваю с погружателем и устанавливают ее в лидерную скважину (рис. 21.1, в). Поддерживая в таком положении погружатель, опускают сваю на заданную глубину (рис. 21.1, г), после чего наголовник отсоединяют от сваи и перемещают кран на новое место.
Способом бескопрового погружения (без устройства лидерной скважины) погружают призматические сваи с использованием свае-установщика 1 (рис. 21.2) с захватным устройством, и крана 2.

Рис. 21.2. Последовательность операций бескопрового погружения призматических свай: а — установка сваи; б — монтаж наголовника с погружателем; в — погружение сваи
После заглубления сваи 5 на 1/4 ее длины ее освобождают от свае-установщика, который перемещается к другой свае. До конца погружения сваи погружатель 3 поддерживается краном через наголовник 4.
Для завинчивания свай применяют специальные устройства, называемые кабестанами, с дополнительной осевой пригрузкой, особенно на начальном этапе, когда лопасти сваи еще недостаточно защемлены грунтом. Винтовые сваи можно погружать в щебени-сто-галечные, гравийно-песчаные, глинистые, а также мерзлые (песчаные и глинистые) грунты.
Перед устройством ростверков — строительных конструкций, объединяющих сваи и служащих для передачи нагрузки от надземной части здания на сваи и грунтовое основание — головы погруженных в грунт свай выравнивают на проектной отметке, срубая их пневматическими молотками и газовой резкой или срезая специальными устройствами — сваерезами.
Набивные сваиизготавливают на месте путем заполнения предварительно пробуренной скважины бетонной смесью с уплотнением или без него. Скважины образуют бурением, пробивкой штампами, иногда с раскаткой или при их устройстве используют сочетание этих способов. В плотных грунтах скважины разрабатывают без крепления их стенок, а в обрушающихся грунтах — с использованием обсадных труб, которые оставляют в скважине или извлекают из нее по мере ее заполнения бетонной смесью. Уши-рения в скважинах под пяты свай образуют режущими уширите -лями рабочих органов бурильных машин или с помощью камуф-летного взрыва, не вызывающего деформаций грунта за пределами означенной зоны. Для механизации работ по устройству набивных свай используют общестроительные машины и оборудование (бурильные, бетоносмесительные, машины для транспортирования, укладки и уплотнения бетонной смеси и др.), а также специальные машины.
§
Универсальным базовым оборудованием для перемещения свай с мест их раскладки к местам погружения, их установки, поддержания и направления, а также для крепления погружателя являются копры, обеспечивающие также передвижение сваебойного оборудования вдоль фронта работ. Копрами, кроме того, погружают сваи-оболочки кольцевого сечения диаметром от 0,5 до 2,5 м длиной до 30 м, состоящие из звеньев длиной 3…8 м, а также металлический шпунт специального корытного или Z-образного профиля длиной до 25 м. Различают копры рельсовые (КР) и навесные (КН) на тракторах, одноковшовых экскаваторах и автомобилях. Применяют также навесное копровое оборудование (КО) на
гусеничных тракторах, экскаваторах и кранах, реже — на автомобильных (пневмоколесных) кранах. Для забивки свай и шпунта в воде используют плавучие копры. Навесные копры и копровое оборудование используют преимущественно в жилищном и промышленном строительстве, а рельсовые копры — в гидротехническом и энергетическом строительстве. Главным параметром отечественных копров, входящих в их индекс, является максимальная длина погружаемых свай (до 8, 12, 16, 20 и 25 м). Так, например, индекс КН-12 расшифровывают как копер навесной для свай длиной до 12 м; КР-16 — копер рельсовый для свай длиной до 16 м и т.д.
По степени подвижности рабочего оборудования различают копры универсальные, полууниверсальные и простые. Универсальные копры обеспечивают полный поворот платформы с установленным на ней оборудованием, изменение вылета и наклон копровой стрелы для погружения наклонных свай. Полууниверсальные копры обеспечивают либо только поворот платформы для погружения вертикальных свай, либо наклон стрелы при работе с наклонными сваями. Простые копры, к которым относится обычно копровое оборудование, не имеют механизмов для поворотных (в плане) движений и наклона стрелы.
Рабочий процесс копра состоит из его перемещения к месту установки сваи, ее строповки, подтягивания, установки на точку погружения по предварительно выполненной разметке, выверки правильности ее положения, закрепления на свае наголовника, предохраняющего ее от разрушения при ударном погружении, установку на сваю погружателя, расстроповку сваи, ее погружение с последующей выверкой направления, подъем погружателя и снятие с погруженной сваи наголовника.
Навесные копрыявляются наиболее распространенным типом машин для производства свайных работ. Они могут быть универсальными и полууниверсальными. В качестве базовых машин используют тракторы, одноковшовые экскаваторы и автомобили. Каждую модель навесного копра комплектуют свайными молотами соответствующих типоразмеров.
Для начала работы на новой строительной площадке навесной копер подготавливают к функционированию в соответствии с инструкцией по эксплуатации, затем с помощью автомобильного крана навешивают на стрелу в ее нижней части свайный молот и закрепляют на нем канат копрового агрегата.
Копры на тракторной базеприменяют для работы со сваями длиной от 8 до 12 м при их линейном или кустовом расположении. Копровую стрелу 2 обычно навешивают на базовый трактор 3 в его задней части (рис. 21.3, а). Ее наклон в продольной вертикальной плоскости на угол от 10 до 33° и в поперечной плоскости на угол до 7° обеспечивается гидравлическими цилиндрами. Для подвески сваепогружателя (свайного молота) / с наголовником, подтаски-

 /// /// /// /// /// /// /// /// /// /// /// ///■/// /// /// /// ///
/// /// /// /// /// /// /// /// /// /// /// ///■/// /// /// /// ///
а б
Рис. 21.3.Копер на базе гусеничного трактора с задней навеской копрового
оборудования: а — рабочее положение; б — транспортное положение
вания и установки сваи в исходное для погружения положение используют канатно-блочные системы с гидравлическим приводом. Управляют копровым оборудованием с рабочей площадки с правой стороны по ходу трактора. Для подготовки к перебазированию копра с него снимают свайный молот, а верхнюю секцию стрелы, соединенную с нижней секцией шарнирно, укладывают на подставку (рис. 21.3, б). На небольшие расстояния копер перемещают собственным ходом, а на дальние перевозят на трейлере.
Копры на тракторной базе изготавливают также с боковой навеской копрового оборудования (рис. 21.4) — обычно с левой стороны по ходу трактора. С правой же стороны располагают гидравлические цилиндры с полиспастами для подъема молота, сваи и противовеса. Управляют копровым оборудованием как из кабины машиниста, так и с выносного пульта.
Последовательность забивки свай определяют так, чтобы суммарное время переездов копра от сваи к свае было минимальным. Наибольший эффект по этому условию достигается при линейной забивке свай, когда машина движется по оси свайного ряда.
Для повышения продольной устойчивости копра при его пере-Движении свайный молот опускают на стреле в его нижнее положе-
 ние, а стрелу (при ее заднем расположении) несколько наклоняют по ходу трактора вперед. В случае работы в котловане перед въездом и выездом из него копер переводят в транспортное положение (см. выше). Выезжают из котлована задним ходом.
ние, а стрелу (при ее заднем расположении) несколько наклоняют по ходу трактора вперед. В случае работы в котловане перед въездом и выездом из него копер переводят в транспортное положение (см. выше). Выезжают из котлована задним ходом.
| 77/ /// 777 /77/7/ /77 /// 7/7 /7/ /// /77 |
Копры на базе канатных экска
ваторов(рис. 21.5) применяют пре
имущественно для забивки свай
длиной до 16 м в котлованах и тран
шеях, располагая их на бровках
выемок. Копровую стрелу 2 соеди
няют с головой экскаваторной
стрелы / универсальным шарни
ром, позволяющим стреле накло
няться в любом направлении (до
20…35° продольно и до 1,5…5° в
поперечном направлении) и по
ворачиваться относительно верти
кальной оси. В нижней части коп-
Рис. 21.4. Копер на базе гусенич- Ровую стрелу соединяют с пово-
ного трактора с боковой навеской Ротнои платформой экскаватора
копрового оборудования ^Ушгидроцилиндрами 4. В систе-
ме наведения используют гидравлический привод с раздельным управлением каждым из двух нижних гидроцилиндров и гидроцилиндра 3 привода механизма поворота стрелы относительно собственной продольной оси. В рабочем положении копровая стрела опирается на грунтовое основание через гидравлический домкрат или выдвижную телескопическую пяту 5. Управляют копровым оборудованием из кабины машиниста.
За счет поворота платформы базового экскаватора рассматриваемые копры имеют обширную рабочую зону, благодаря чему они могут погружать несколько свай с одной рабочей позиции. По сравнению с тракторными копрами, перемещающимися на новую позицию после погружения каждой сваи, экскаваторные копры затрачивают меньше времени на выполнение операций рабочего цикла и поэтому обеспечивают более высокую производительность при прочих равных условиях. Наиболее эффективно использование экскаваторных копров при кустовом расположении свай. Копры на экскаваторной базе при работе в однородных фунтах средней плотности и проходимости могут погружать за смену до 25… 30 свай длиной 8 м, до 15… 20 свай длиной 12 м и до 8… 12 свай длиной 16 м.
Копры на автомобильной базеприменяют преимущественно на рассредоточенных свайных работах малых объемов в радиусе до
 200 км, в частности, в строительстве технологических трасс, в трубопроводном и сельскохозяйственном строительстве при длине свай до 8 м. Автомобильными копрами погружают также пробные сваи при инженерно-геологических изысканиях, контрольных исследованиях, привязке и корректировке проектов свайных фундаментов. Конструктивно копровое оборудование сходно с таковым для навески на гусеничные тракторы.
200 км, в частности, в строительстве технологических трасс, в трубопроводном и сельскохозяйственном строительстве при длине свай до 8 м. Автомобильными копрами погружают также пробные сваи при инженерно-геологических изысканиях, контрольных исследованиях, привязке и корректировке проектов свайных фундаментов. Конструктивно копровое оборудование сходно с таковым для навески на гусеничные тракторы.
| ////////////////// //Г /7/177 |
В случае межобъектных переездов копровое оборудование укладывают в транспортное положение в течение 10… 15 мин без разборки, снятия молота и применения грузоподъемных средств. Средняя эксплуатационная производительность автомобильных копров при работе со сваями длиной 6…8 м в грунтах средней плотности и проходимости составляет 18…22 сваи в смену.
| Рис. 21.5. Копер на базе канатного экскаватора |
Рельсоколесный копер(рис. 21.6) состоит из нижней рамы 1 с ходовыми тележками 2, поворотной платформы 6, опирающейся на нижнюю раму через опорно-поворотное устройство, с расположенными на ней силовой установкой (обычно электрической), механизмами (в том числе одной или двумя лебедками для подъема и установки в рабочее положение сваи и погружателя), органами управления, кабиной и противовесом, мачты Зн механизмов 4 и 5 для изменения ориентации мачты относительно платформы. В зависимости от принятой технологии работ копер комплектуют свайным молотом, вибропогружателем или вибромолотом.
Если размеры и конфигурация свайного поля таковы, что с одной установки рельсового пути нельзя погрузить в грунт все сваи, то для работы используют несколько копров, работающих каждый на своем рельсовом пути, или перекладывают рельсовый

T ni путь после выполнения ра-
бот с прежней его установки. После перемещения копра его надежно стопорят стояночными тормозами или другими устройствами.
| Рис. 21.6. Универсальный копер на рельсовом ходу |
Для районов массового жилищного и промышленного строительства, а также при возведении зданий и сооружений на слабых и во-донасыщенных фунтах или при наличии в строящемся здании значительного технического подполья наиболее рационально применять копры мостового типа— КМ (рис. 21.7, а), называемые также мостовыми копровыми установками, состоящими из самоходного моста 4, передвигающегося по рельсам 5, уложенным вдоль свайного поля (обычно на бровках котлована), и тележки 3 с копровым оборудованием 2 или рельсового копра, перемещающихся по мосту поперек свайного поля. Все механизмы копровой установки приводятся в движение электродвигателями с гидравлическими автоматизированными (координатно-шаговыми) или неавтоматизированными системами наведения. В случае автоматического наведения сваи на точку погружения установки обеспечены программным или полуавтоматическим управлением с использованием следящих устройств, устанавливаемых на механизмах передвижения моста и копрового оборудования. Управляют координатно-шаговым устройством из кабины / с кнопочного пульта или системы кнопочного набора кодовых знаков телефонного типа. Известны также мостовые копровые установки на рельсовом или гусеничном ходу, не имеющие систем наведения свай.
Перевозят мостовые копры седельным автомобилем-тягачом с использованием прицепа-роспуска (рис. 21.7, 6, который подводят под мост после его вывешивания. Копровую стрелу переводят в транспортное положение с помощью гидравлического
| i/ XI/ XI/ XI/ | у XI/ XI/ XI/ XI/ |

////// /// /// w м /// /// /// /// /// ///////// Ш Ш /// ‘W’//f
Рис. 21.7. Копер мостового типа (а) и его перевозка в транспортном
положении (б)
механизма складывания. Продолжительность операций по переводу мостового копра в транспортное положение и обратно составляет 3…4 ч без применения дополнительных грузоподъемных средств.
Для работы со сваями длиной 3… 12 м отечественная промышленность выпускает также копровое оборудование,навешиваемое на базовые машины (тракторы, автомобильные краны, одноковшовые экскаваторы).
Копровое оборудование автономно по энергоснабжению, ма-невренно на строительной площадке, надежно в эксплуатации. Его недостатком являются повышенные затраты времени на маневровые движения для установки сваи в заданную точку свайного поля. Навесное копровое оборудование на базе автомобильных кранов применяют при малых рассредоточенных объемах свайных работ и необходимости быстрого перебазирования (пробные сваи при инженерно-геологических исследованиях, строительство линий электропередачи, трубопроводов большой протяженности и т.п.).
Сменную техническую производительность копров, определяемую числом погруженных за смену свай, рассчитывают ориентировочно по формуле
где Гс— продолжительность смены, ч; Гц — продолжительность рабочего цикла при погружении одной сваи, ч, включающая продолжительность собственно погружения и продолжительность вспомогательных операций (переезд машины на новую позицию, подтаскивание, подъем, ориентирование сваи и др. операции). Продолжительность операций определяют хронометрированием, а среднюю продолжительность вспомогательных операций ориентировочно принимают от 43… 63 % рабочего цикла для копров первой размерной группы (для свай длиной до 8 м) до 77… 83 % — для копров шестой размерной группы (для свай длиной до 25 м).
Свайные молоты
Свайный молот включает в себя ударник — падающую или ударную часть, наковальню или шабот — неподвижную часть, жестко соединенную с головой сваи. Кроме того, в состав свайного молота входят устройства для подъема ударной части и ее направления. Различают механические, паровоздушные, дизельные и гидравлические свайные молоты.
Механический молотявляется простейшим механизмом в виде металлической отливки массой до 5 т, поднимаемой вдоль мачты копра канатом подъемной лебедки и сбрасываемой на погружаемую сваю путем отсоединения каната специальным расцепляющим устройством или отключением барабана лебедки от трансмиссии. Из-за низкой производительности (4… 12 ударов в мин) механические молоты применяют в основном при незначительных объемах свайных работ.
Паровоздушный молотпредставляет собой пару «цилиндр —поршень». В молотах одиночного действия (рис. 21.8, а) поршень Зчерез шток 2 соединен с наголовником 1 сваи, а ударной частью является цилиндр 4. Под действием сжатого воздуха или пара, подаваемого в поршневую полость цилиндра от компрессора или паросиловой установки, цилиндр поднимается вверх, а после перекрытия впускного трубопровода и соединения поршневой полости с атмосферой (рис. 21.8, б) цилиндр падает, ударяя по наголовнику сваи. Впуском и выпуском сжатого воздуха (пара) управляют вручную, полуавтоматически или автоматически. Молоты с автоматическим управлением работают с частотой ударов 40…50 мин»1.
В молотах двойного действия (рис. 21.8, в) ударной частью является соединенный с поршнем 3 боек 5, движущийся внутри цилиндра 4. Сжатый воздух (пар) подают поочередно в нижнюю што-
 ковую и верхнюю поршневую (рис. 21.8, г) полости цилиндра, обеспечивая этим подъем поршня с бойком и его принудительное падение на ударную плиту — наковальню 6(см. рис. 21.8, в) с частотой 3 С»1. По сравнению с молотами одиночного действия описанные молоты производительнее при меньшем отношении массы ударной части к общей массе молота, не превышающем 1/4, в то время как у молотов одиночного действия это отношение равно в среднем 2/3.
ковую и верхнюю поршневую (рис. 21.8, г) полости цилиндра, обеспечивая этим подъем поршня с бойком и его принудительное падение на ударную плиту — наковальню 6(см. рис. 21.8, в) с частотой 3 С»1. По сравнению с молотами одиночного действия описанные молоты производительнее при меньшем отношении массы ударной части к общей массе молота, не превышающем 1/4, в то время как у молотов одиночного действия это отношение равно в среднем 2/3.
Паровоздушные молоты используют для забивки вертикальных и наклонных свай на суше, а также под водой. Основным их недостатком является зависимость от компрессорных или паросиловых установок.
| Рис. 21.8. Принцип работы паровоздушных молотов одиночного (о и б) и двойного {в и г) действия |
Гидравлический молотработает по схеме паровоздушного молота двойного действия с тем отличием, что вместо воздуха или пара в рабочий цилиндр подают жидкость, для чего сваебойный агрегат оборудуют насосной установкой. Для придания ударной части ускорения в момент удара к насосу подсоединяют гидравлический аккумулятор, который подзаряжается во время обратного хода поршня. Гидравлические молоты с массой ударной части 210… 7500 кг развивают энергию удара от 3,5 до 120 кДж при частоте ударов 50… 170 мин»1.
Дизельные молоты(рис. 21.9), работающие независимо от внешних источников энергии в режиме двухтактного дизеля получили наибольшее распространение в строительстве. Различают дизель-молоты с направляющими штангами {штанговые) и с направляющим цилиндром {трубчатые).
У штанговых дизель-молотов (см. рис. 21.9, а) две направляющие штанги 4 объединены в нижней части основанием 2, отлитым заодно с поршнем 12. Основание поршневого блока опирается на сферическую пяту / и наголовник 15. По штангам перемещается цилиндр 10, являющийся ударной частью молота. В верхней части штанги объединены траверсой 7 захвата («кошки»), свобод-
 Рис. 21.9. Дизель-молоты: а — штанговый; б — трубчатый
Рис. 21.9. Дизель-молоты: а — штанговый; б — трубчатый
но перемещающейся по ним и подвешенной к канату 8 лебедки копра. Для запуска молота «кошку» опускают до зацепления подпружиненным крюком 6 пальца 5 ударной части, после чего ударную часть 10 поднимают и рывком нажатием на рычаг 9 через присоединенный к нему канат расцепляют «кошку» с ударной частью. Последняя падает вниз, нанося удар по основанию 2 и сжимая воздух в закрытой поршнем 12 полости цилиндра. Одновременно выступающий на ударной части штырь 11 нажимает на рычаг топливного насоса 14, которым по центральному каналу 13 в поршне топливо подается в цилиндр с некоторым опережением конца хода, распы-
ляется форсункой 3 и смешивается с нагретым вследствие сжатия воздухом. В последней фазе движения ударной части вниз вследствие дополнительного сжатия топливно-воздушнои смеси происходит ее воспламенение. Расширяющиеся вследствие сгорания топлива газы отбрасывают ударную часть вверх, откуда она снова падает, повторяя процесс. Молот выключают прекращением подачи топлива.
Штанговые дизель-молоты не имеют принудительного охлаждения, в связи с чем в летнее время при температуре окружающего воздуха 25 °С они работают с получасовыми перерывами после каждого часа работы. Эти молоты обладают малой энергией удара — 3,2 и 65 кДж при частоте 50…55 мин ‘ и массе ударной части 240 и 2500 кг соответственно. Их применяют для забивки легких железобетонных и деревянных свай в слабые и средние фунты, а также для погружения шпунта при ограждении траншей, котлованов и т.п.
В трубчатом дизель-молоте (см. рис. 21.9, б) ударной частью служит поршень 22, перемещающийся в направляющем цилиндре 21. Удары поршня воспринимаются шаботом 17, герметично посаженным в нижнюю часть рабочей секции цилиндра. Молот центрируют на свае штырем 16. Для пуска молота его поршень поднимают «кошкой» 20, подвешенной к канату 8, и сбрасывают. При движении вниз поршень отжимает рычаг 23, которым включается насос 14, впрыскивающий в цилиндр порцию топлива из полости 19. Смешиваясь с воздухом, топливо стекает в сферическую выемку в шаботе. При дальнейшем падении поршень перекрывает канал 18, сообщающий цилиндр с атмосферой, и сжимает воздух в замкнутом уменьшающемся объеме. От удара поршня о шабот топливно-воздушная смесь разбрызгивается и воспламеняется. Расширяющиеся при сгорании смеси газы подбрасывают поршень вверх, откуда он снова падает, сжимая воздух, удаляя отработавшие газы через канал 18 в атмосферу и повторяя процесс. После прекращения подачи топлива молот останавливается.
Трубчатые дизель-молоты охлаждаются внешним воздухом или принудительно — водой. Они работают без перегрева при температуре окружающего воздуха до 30 °С в первом и до 40 °С — во втором случаях. Отечественная промышленность выпускает трубчатые дизель-молоты массой ударной части 500…5000 кг с энергией удара 15… 150 кДж при частоте ударов 43… 45 мин ~’, в том числе для работы в условиях низких температур (до -60 °С). Эти молоты применяют Для забивки железобетонных свай в любые нескальные грунты.
§
Вибропогружатель(рис. 21.10) представляет собой возбудитель направленных колебаний (см. рис. 19.8) вдоль оси сваи. Будучи соединенным со сваей посредством наголовника 4, он сообщает ей возмущающее периодическое усилие, которым, вместе с си-

Рис. 21.10. Низкочастотный (а) и высокочастотный (б) вибропогружатели
лой тяжести сваи и вибропофужателя, преодолеваются сопротивления погружению сваи в фунт. Эффект пофужения достигается благодаря тому, что за счет вибрации сваи относительно защемляющего ее фунта коэффициент трения на контактной поверхности этих тел резко уменьшается. Для увеличения амплитуды возмущающей силы вибропогружатели изготовляют многодебалансны-ми, состоящими из нескольких пар дебалансов 3 (см. рис. 21.10, а). Обычно дебалансы выполняют заодно с зубчатыми колесами 2, передающими движение от электродвигателя 1. Дебалансы вращаются синхронно навстречу друг другу. Корпус двигателя соединяют с вибровозбудителем жестко (низкочастотые вибропогружатели с частотой колебаний до 10 Гц) или через пружинные амортизаторы 5 (см. рис. 21.10, б) (высокочастотные вибропогружатели с частотой 16,6 Гц и более), снижая этим вредные воздействия вибрации на электродвигатель. Управляют вибропогружателями дистанционно.
В пределах своего назначения — погружения свай в песчаные и супесчаные водонасыщенные грунты — вибропогружатели в 2,5—3 раза производительнее свайных молотов. Они удобны в управлении, не разрушают погружаемых ими строительных элементов. К их недостаткам относится офаниченная область применения и сравнительно небольшой срок службы электродвигателей из-за вредного влияния вибрации.
Вибромолоты(рис. 21.11) отличаются от вибропогружателей способом соединения корпуса вибровозбудителя с наголовником 6: через пружинные амортизаторы 5, которые позволяют корпусу вибровозбудителя совершать колебания с большими размахами, отрываясь от наголовника и ударяя бойком 3 по наковальне 4 при
обратном движении. Обычно вибромолоты изготавливают бестрансмиссионными, сажая дебалансы 2 непосредственно на валы двух синхронно работающих электродвигателей, статоры которых установлены в едином корпусе /.
| Рис. 21.11. Принципиальная схема устройства вибромолота |
Важной особенностью работы вибромолотов является их способность к самонастройке — повышению энергии удара с увеличением сопротивления погружению сваи, приводящей к увеличению жесткости системы свая — грунт. Выпускаемые отечественной промышленностью вибромолоты характеризуются энергией удара до 3,9 кДж при массе до 2850 кг.
Вибромолоты применяют также для выдергивания свай и шпунтов, для чего используют специальные наголовники, у которых наковальню располагают над ударной частью, а вибромолот переворачивают на 180°.
Контрольные вопросы
1. Какие типы свай используют для устройства свайных фундаментов?
Какие из них получили наибольшее распространение в строительстве?
Какими способами погружают в грунт сваи заводского изготовления?
Как изготовляют буронабивные сваи? Какие машины применяют для
этого?
2. Для чего предназначены копры? Какие машины используют в каче
стве базовых для работы с копровым оборудованием? Перечислите дос
тоинства и недостатки работы копрового оборудования по сравнению с
работой копров. Для каких условий предпочтительно использовать коп
ровое оборудование на базе автомобильных кранов?
3. Опишите способы бескопрового погружения свай. Какие машины
применяют для этого?
4. Перечислите виды свайных молотов. Как они устроены и как рабо
тают? Назовите их основные параметры. Какими преимуществами и не
достатками обладают отдельные их виды? Назовите предпочтительные
области их применения.
5. Для чего предназначены, как устроены и как работают вибропогру
жатели? Перечислите их преимущества и недостатки перед другими ви
дами погружателей.
6. Для чего предназначены, как устроены и как работают вибромоло
ты? В чем заключается самонастройка вибромолотов? Назовите основ
ные параметры вибромолотов. В чем заключается переналадка вибромо
лота на режим свае- и шпунтовыдергивателя?
§
Общие сведения
Нерудные каменные материалы — гравий, щебень и песок — используют в строительстве в качестве заполнителей для изготовления бетонных и железобетонных изделий, сооружения частей зданий из монолитного бетона и железобетона, для устройства подстилающего слоя дорожного покрытия и в других случаях. Гравий и песок добывают из естественных отложений механическим и гидравлическим способами, а щебень — из естественного камня путем его дробления.
Добываемые каменные материалы перерабатывают на камнедробильных и промывочно-сортировочных заводах, а затем, в виде готового продукта стандартного качества, доставляют потребителю.
Качество гравия и щебня характеризуется зерновым составом, формой зерен, механической прочностью и содержанием засоряющих примесей. В зависимости от крупности зерен эти материалы разделяют на фракции, каждая из которых характеризуется минимальным и максимальным (средними по трем измерениям) размерами.
По форме зерна бывают лещадными, у которых длина в три и более раз больше ширины, и кубообразными.
В соответствии с действующими стандартами в полученном после обработки готовом продукте (гравии и щебне) допускается не более 15% лещадных зерен.
Механическая прочность щебня определяется прочностью исходной горной породы: малой (до 80 МПа), средней (80… 150 МПа), высокой (150…250 МПа) и особо высокой (более 250 МПа) прочности.
Пески по степени крупности зерен разделяют на крупные, средние и мелкие.
В процессе переработки нерудных материалов для освобождения песка и в отдельных случаях щебня от глинистых и других вредных примесей их промывают и обезвоживают. В результате обезвоживания снижается влажность материала до уровня, допускающего его транспортирование и предотвращающего смерзание в зимнее время.
22.2. Машины для измельчения (дробления) каменных материалов
В процессе дробления наиболее крупные зерна исходного материала со средним размером Z)max измельчаются до среднего размера 4пах- Отношение /= Dmax/dmmназывают степенью дробления. В зависимости от конечной крупности кусков дробления различают крупное (100…350 мм), среднее (40… 100 мм), мелкое (5…40 мм) дробление и помол (от 5 мм и ниже).
Каменные материалы дробят раздавливанием, раскалыванием, ударом и истиранием. Для дробления материалов применяют дробилки, реализующие первые три метода, а для помола — мельницы, измельчающие материалы ударом и истиранием. Некоторые дробилки могут работать как дробилки и как мельницы (например, валковые дробилки).
По принципу действия и конструктивным признакам дробилки делят на щековые, конусные, валковые, молотковые и роторные, а мельницы — на барабанные, шаровые, бегунковые и вибрационные. В строительстве наибольшее применение имеют щековые, конусные и роторные дробилки. Мельницы являются специальным заводским оборудованием промышленности строительных материалов и в настоящем учебнике не рассматриваются.
Дробление каменных материалов относится к наиболее древнему виду деятельности человека и восходит к 8 тысячелетию до нашей эры. Тогда человек для дробления использовал пест и ступку из камня. Позднее египтяне и китайцы использовали каменные жернова из двух камней, приводимых в движение ногой человека. Эти орудия применялись в основном в сельском хозяйстве и лишь отчасти в горном деле. Создание дробилок как машин относится к XIX в. В 1806 г. в Англии появились дробильные валки, в 1858 г. инженером Э. Блеком (США) были созданы щековые дробилки, получившие широкое распространение. В 1870-х гг. в США была создана конусная дробилка, внедренная в практику в 1886 г. инженером Гейтсом. В 1890-х гг. в США были созданы дробилки ударного действия, а в начале XX в. — конусные дробилки мелкого и среднего дробления.
Дробилки характеризуются производительностью, размерами загрузочного и разгрузочного отверстий, диапазоном регулирования разгрузочной щели, конструктивной степенью дробления, определяемой как отношение ширины загрузочного отверстия к ширине разгрузочной щели, и наибольшим размером кусков в исходном материале, определяемым из условий их захвата дробящими органами и размером загрузочного отверстия.
Материалы дробят в две — три, реже — в одну стадию. На каждой стадии дробления с использованием дробилок различных типов получают материал с требуемыми размерами частиц, которые отсеивают на грохотах, установленных перед дробилками. Дробилки последних стадий работают, как правило, в замкнутом цикле
с виброгрохотом. При этом материал крупнее заданного возвращается в ту же дробилку для повторного дробления (рис. 22.1).
| Рис. 22.1. Типовая схема дро-бильносортировочной установки: 1 — вагонетка; 2 — пластинчатый конвейер; 3 — колосниковый грохот; 4 — щековая дробилка; 5 и 7— виброгрохоты; 6 — валковая дробилка; 8 — бункер для песка и пыли; 9 — расходный бункер; 10 — склады товарного щебня |
В щековых дробилках(рис. 22.2), применяемых для крупного и среднего дробления прочных и средней прочности пород на первичной и вторичной стадиях дробления, материал дробится в рабочей камере (камере дробления), ограниченной боковыми 2 и передней (неподвижной щекой) 1 стенками корпуса, а также дробящим органом — подвижной щекой 3, совершающей колебательные движения. При сближении щек материал разрушается дробящими плитами 14 и /5 с рифленой рабочей поверхностью, а при отходе подвижной щеки раздробленный продукт (с размерами, не превышающими ширины разгрузочной щели) гравитационно разгружается из рабочей камеры.
По характеру движения подвижной щеки различают щековые дробилки с простым и со сложным качанием подвижной щеки.
У дробилок с простым качанием
подвижной щеки (см. рис. 22.2, а) подвижная щека 3 подвешена на оси 4 к корпусу машины, относительно которой она совершает круговые качательные движения за счет эксцентрично посаженного на вал 5, приводимый электродвигателем 8 через ременную передачу 7, шатуна 6, соединенного со станиной и подвижной щекой распорными плитами 12 и 13. Ось шейки вала, на которую посажен шатун, совершает круговые движения, а нижний конец шатуна — круговые колебательные движения относительно гнезда распорной плиты 12 в сухаре-упоре 11. При движении нижнего конца шатуна вверх подвижная щека сближается с неподвижной щекой, а при движении вниз — отходит от нее под действием собственной силы тяжести и усилия сжатия пружины 9 на тяге 10. Размер разгрузочной щели регулируют положением упора 11 с помощью гидродомкрата.
В дробилках с простым качанием подвижной щеки материал дробится раздавливанием. Исходная крупность материала составляет 750… 1300 мм.
У дробилок со сложным качанием подвижной щеки (см. рис. 22.2, в) последняя подвешена эксцентрично к шейке приводного вала 5, а нижней частью она соединена с распорной плитой 12, упирающейся своим вторым концом в сухарь //, регулируемый винтом 23. Ось шейки вала, на которую посажена подвижная щека, совершает круговые движения, а нижний конец щеки — круговые колебательные движения относительно гнезда распорной плиты 12 в сухаре 11. При такой кинематике материал дробится раздавливанием и истиранием. Исходная крупность материала составляет 210…510 мм.
При дроблении прочных и абразивных материалов из-за истирающего воздействия дробящие плиты подвергаются повышенному износу. Кроме того, образуется большое количество каменной мелочи (пыли), идущей в отход. По этой причине дробилки со сложным качанием подвижной щеки пригодны, в основном, для дробления неабразивных пород. Однако благодаря сравнительно малой массе и габаритам, простоте конструкции эти машины в ряде случаев используют также для дробления прочных и абразивных материалов, в частности, на передвижных дробильно-сор-тировочных установках, где указанные выше преимущества имеют решающее значение.
Цикличный характер работы щековых дробилок (максимальное нагружение при сближении щек и холостой ход при их расхождении) создает неравномерную нагрузку на двигатель, для выравнивания которой на приводном валу 5 устанавливают шкив-маховик 17 (см. рис. 22.2, а—в), а на крупных дробилках, кроме того, маховик 18 (см. рис. 22.2, а и б). Шкив-маховик соединен с валом через фрикционную муфту 16 (см. рис. 22.2, а), пробуксовывающую при перегрузках. Для пуска крупных дробилок применяют вспомогательный электродвигатель 22 (см. рис. 22.2, б), соединенный с валом основного двигателя через ременную передачу 21, зубчатый редуктор 20 и обгонную муфту 19. Основной двигатель 8 включается с некоторым запаздыванием по отношению к вспомогательному двигателю. Последний отключается, когда частота вращения вала основного двигателя достигнет частоты вращения выходного вала редуктора.
Современные дробилки оснащают пружинными устройствами, предохраняющими элементы машины от поломок при попадании в камеру дробления недробимых включений. Их устанавливают либо на одной из распорных плит, либо встраивают в шкив в месте его соединения с приводным валом.
Основными параметрами щековых дробилок являются: ширина В и длина L приемного отверстия камеры дробления. Ширина В определяется максимальным размером Z)max загружаемых кусков: В = = l,2Dmax. Отечественная промышленность выпускает щековые дробилки с размерами BxL от 160×250 до 1500×2100 мм.
Производительность щековых дробилок l800ScpLbn(B b)C
где П — производительность щековых дробилок, м3/ч; ^р — средний ход подвижной щеки, м; b — ширина выходной щели при отходе подвижной щеки, м; п — частота вращения эксцентрикового вала, с1; С — коэффициент, учитывающий кинематику движения подвижной щеки (для дробилок с простым движением щеки С- 0,85; со сложным движением С= 1); Др — средневзвешенный размер кусков исходного материала, м; а — угол захвата (угол между подвижной и неподвижной щеками).
1 2

Конусные дробилки(рис. 22.3) применяют на всех стадиях дробления горных пород любой прочности, за исключением вязких материалов с большим содержанием глины. Крупность исходного материала при крупном дроблении составляет 400… 1200 мм, а при среднем и мелком дроблении — 40…500 мм.
Камера дробления ограничена снаружи неподвижным конусом 5, а изнутри — подвижным конусом 4, посаженным на вал 3, эксцентрично вставленный в стакан 16, приводимый во вращение от вала 15 через коническую зубчатую пару 14—1. При вращении стакана подвижный конус совершает круговые (гирационные) движения относительно вертикальной оси стакана так, что зоны наибольшего и диаметрально противоположного наименьшего его сближений с неподвижным конусом 13 непрерывно перемещаются по кругу последнего. В зоне сближения конусов происходит раздавливание и истирание материала, а в зоне отхода — его разгрузка. Исходный материал загружают через приемную коробку 8, откуда он ссыпается на распределительную тарелку 7, закрепленную на валу 3, и при вращении вала равномерно распределяется по кольцу дробящей камеры. Неподвижный конус установлен на кольцевом бандаже 10, соединенном резьбой с опорным кольцом П. Последнее опирается на станину 12, прижимаясь к ней пружинами 2. Резьбовое соединение служит для регулирования размера разгрузочной щели, в том числе и при износе защитных футеро-вок 6 и 9 дробящих конусов, а соединение с помощью пружин — для предохранения от поломок при попадании в камеру дробления недробимого включения. В указанном случае опорное кольцо
Рис. 22.2. Щековые дробилки: с простым качанием щеки; 6 — кинематическая схема ее привода; в — со
сложным качанием щеки

Рис. 22.3. Конусная дробилка
приподнимается над станиной, пропуская в разгрузочную щель недробимое включение.
Конусные дробилки различают по крупности материала. Они делятся на дробилки крупного, среднего и мелкого дробления. В строительстве применяют в основном дробилки среднего и мелкого дробления, используя их при многостадийном дроблении.
Главным параметром конусной дробилки является диаметр основания дробящего конуса, который входит в индекс типоразмера дробилки. Например, КСД-2200 расшифровывается как конусная дробилка среднего дробления с диаметром дробящего конуса 2200 мм; КМД-2200 — тоже дробилка мелкого дробления.
Для получения качественного продукта нижняя часть камеры дробления у дробилок типов КСД и КМД имеет участок с параллельными образующими неподвижного и подвижного конусов, при прохождении которого материал калибруется кратным на-
QA
гружением. При этом крупность продукта дробления определяется шириной щели в зоне максимального сближения конусов. Расчетная производительность конусных дробилок
П = 3600 к kpnblD,
где П — расчетная производительность конусной дробилки, м3/ч; кр— коэффициент разрыхления дробимого материала, равный отношению объема определенной массы исходного материала к объему продукта дробления (в среднем кр = 0,45); п — частота вращения дробящего конуса, с1; b — ширина выходной щели в зоне максимального сближения конусов, м; / — длина участка калибровки, м; D — диаметр основания дробящего конуса, м.
Валковые дробилки(рис. 22.4) применяют для среднего вторичного дробления пород средней и малой прочности, а также вязких и влажных материалов с исходными размерами кусков от 20 до 100 мм.
Рабочими органами являются вращающиеся навстречу друг другу цилиндрические валки 2 и 4 с гладкой или рифленой рабочей поверхностью. Попадающие в рабочую зону куски материала
2 3

2 3
45


 rr
rr

 Рис. 22.4. Валковая дробилка (а) и ее конструктивная схема (б)
Рис. 22.4. Валковая дробилка (а) и ее конструктивная схема (б)
увлекаются трением о них валков и затягиваются в межвалковое пространство, подвергаясь раздавливанию, излому и истиранию, а при рифленых валках — еще и раскалыванию. Валки смонтированы на станине 1 на подшипниках 3 и 6, один из которых опирается на пружину 5, позволяющей валку отодвигаться при попадании в рабочую зону недробимого предмета. Производительность валковых дробилок
где П — производительность валковых дробилок, м3/ч; b — ширина разгрузочной щели, м; L, D — длина и диаметр валка, м; v — окружная скорость валков, м/с; к — коэффициент, учитывающий использование длины валков, степень разрыхления материала, неравномерность его подачи {к = 0,1 …0,3 для мягких и к = 0,4…0,5 для твердых пород).
Роторные дробилки(рис. 22.5) применяют для дробления малоабразивных горных пород средней прочности (известняков, доломитов, мергелей и т.п.) с крупностью исходных кусков от 100… 1100 мм. По технологическому процессу различают роторные дробилки крупного, среднего и мелкого дробления. Главными параметрами являются размеры ротора — его диаметр и длина.
Рабочим органом дробилки является ротор / с жестко закрепленными на нем в несколько (от 2 до 6) рядов билами 2. Загружаемый в дробильную камеру, ограниченную лобовой 3 и боковыми 4 стенками станины, отражательными плитами 7 и // и ротором, материал разрушается ударом по нему бил при вращении ротора с окружной скоростью 20…50 м/с и ударами об отражательные плиты, чем достигается высокая степень дробления — 10…20. Размер разгрузочной щели регулируют тягами 5 и 10, на которые одеты пружины 6 и 9, позволяющие отражательным плитам отклоняться при попадании в
 зону разгрузки недробимых предметов.
зону разгрузки недробимых предметов.
По сравнению со щековы-ми и конусными дробилками роторные дробилки имеют меньшие массу и габаритные размеры, просты по устройству, менее чувствительны к перегрузкам, более производительны и обеспечивают выход щебня преимущественно кубообразной формы. Основной их недостаток — малый ресурс бил.
| Рис. 22.5. Роторная дробилка |
Производительность роторных дробилок
11
где П — производительность роторных дробилок, м3/ч; Lp и 0р — длина и диаметр ротора, м; к — коэффициент, учитывающий положение отражательных плит (к = 1,7…2 для дробилок крупного дробления, А: = 1,1 для дробилки среднего и мелкого дробления); 1>р — окружная скорость бил, м/с; z — число рядов бил на роторе. Молотковые дробилкиприменяют для дробления пород средней прочности, а также мягких материалов (шлака, гипса, мела и т.п.) с размерами исходных кусков от 150 до 600 мм. Они отличаются от роторных дробилок ударными органами — шарнирно закрепленными на роторе молотками вместо бил и менее жестким ударом по дробимому материалу.
Сортировочные машины
Сортировкой называют процесс разделения естественных или раздробленных материалов на фракции по крупности механическим, гидравлическим или воздушным способами. Наиболее распространен механический способ просеиванием на грохотах, называемый грохочением. Основной частью грохота является просеивающая поверхность в виде колосников из стальных прутьев, сит из плетеной или сварной сетки, а также решет, штампованных из листовой стали или литых из резины. Зерна, прошедшие через отверстия просеивающей поверхности называют нижним классом, а оставшиеся на этой поверхности — верхним классом. При перемещении по просеивающей поверхности не все зерна с размерами, меньшими ее отверстий, переходят в нижний класс, вследствие чего верхний класс оказывается засоренным зернами нижнего класса. Отношение (в процентах) массы зерен, прошедших сквозь сито1, к массе материала такой же крупности, содержащейся в верхнем классе, называют эффективностью грохочения. В зависимости от материала и типа грохота этот показатель колеблется в пределах 86…95 %.
На грохотах устанавливают до трех сит с различными размерами отверстий, располагая их в одной плоскости (рис. 22.6, а), ярусами (рис. 22.6, б) или комбинированно (рис. 22.6, в). В первой схеме сита располагают в порядке от наиболее мелкого по размерам отверстий просеивающей поверхности к наиболее крупному. Эта схема наиболее проста и удобна для обслуживания. Ее недостатками являются: большая длина грохота, интенсивный износ первого, наиболее мелкого сита, воспринимающего всю массу просеиваемого материала, низкое качество грохочения из-за увлечения
 ‘ Здесь и далее термином «сито» обозначена просеивающая поверхность как сита, так и решета.
‘ Здесь и далее термином «сито» обозначена просеивающая поверхность как сита, так и решета.
 15…О
15…О
60…30
Рис. 22.6. Схемы расположения сит на грохотах:
а — от мелкого к крупному; 6 — от крупного к мелкому; в — комбинированно
в верхнем классе мелких частиц более крупными. При ярусной схеме — от крупного к мелкому — достигается высокое качество грохочения, более равномерный износ сит, но ухудшается доступ к последним. Наиболее распространена комбинированная схема — промежуточная по достоинствам и недостаткам.
Различают грохочение предварительное, промежуточное и товарное (окончательное). Первичное грохочение применяют для грубой сортировки на крупные и мелкие куски перед дробилками первичного дробления. При промежуточном грохочении из дробленого материала выделяют более крупные куски для повторного дробления. При окончательном грохочении материал разделяют на фракции в соответствии с требованиями стандарта.
Грохотыклассифицируют по типу просеивающей поверхности (колосниковые, плетеные и штампованные), по характеру ее движения {неподвижные, качающиеся, вибрационные и вращающиеся), по форме (плоские и цилиндрические) и по положению в пространстве (горизонтальные и наклонные).
Наиболее просты по устройству неподвижные колосниковые грохоты, в которых материал перемещается по наклонной просеивающей поверхности гравитационно. Производительность неподвижных грохотов невысокая, их применяют, в основном, для предварительного грохочения.
Барабанный грохотпредставляет собой установленный наклонно (под углом 5…7° к горизонту) вращающийся с частотой 15… 20 об/мин барабан диаметром 600… 1000 мм и длиной 3… 3,5 м, цилиндрическая обечайка которого состоит из нескольких просеивающих секций с различными размерами отверстий. Материал загружают в секцию с меньшими размерами отверстий. Производительность
барабанных грохотов составляет 10…45 м3/ч при мощности двигателя 1,7 …4,5 кВт. Из-за низкого качества грохочения и большого расхода энергии барабанные грохоты имеют ограниченное применение.
Большей эффективностью грохочения обладают грохоты с плоской просеивающей поверхностью (см. рис. 22.7), которой сообщают колебательное движение для встряхивания материала. К ним относятся эксцентриковые и инерционные грохоты.
Эксцентриковый грохот(рис. 22.7, а) состоит из наклонного под углом 15…25° короба / с ситами б и 8, шарнирно подвешенного к шейкам приводного вала 7 с дебалансами 5, и опирающегося по краям на пружины 2. При вращении вала, приводимого электродвигателем 3 через клиноременную передачу 4, материалу на просеивающей поверхности сообщаются круговые колебания, способствующие его прохождению в отверстия сит.
Инерционные грохотыустанавливают и наклонно — с углом к горизонту 10… 25° (см. рис. 22.7, б), и горизонтально (см. рис. 22.7, в и г). Конструктивно наклонно устанавливаемые инерционные грохоты подобны эксцентриковым грохотам, но отличаются от послед-



X
в г
Рис. 22.7. Схемы плоских грохотов: а — эксцентриковый; б — инерционный наклонный; в, г — инерционный гори-
зонтальный
них формой приводного вала — прямого у первых и эксцентрикового у вторых. В отличие от эксцентриковых грохотов, амплитуда колебаний которых постоянна, у инерционных грохотов она изменяется в зависимости от загрузки грохота — с ее увеличением амплитуда колебаний короба, составляющая 3,7…4,5 мм, автоматически уменьшается, защищая конструкцию от перегрузок. Наклонно установленные инерционные грохоты применяют для тяжелых условий работы при товарном грохочении, а также для предварительного грохочения крупнокусковых материалов перед первичным дроблением. В последнем случае вместо сит устанавливают колосники.
В горизонтальных инерционных грохотах вибровозбудителем является вибратор направленных колебаний 9, возмущающее усилие которого направлено к плоскости просеивающей поверхности под углом р = 35… 45°. Короб опирается либо на пружины (см. рис. 22.7, в), либо на пластинчатые рессоры (см. рис. 22.7, г). Просеивающей поверхности сообщаются эллиптические (в случае пружинных опор) или наклонные, близкие к прямолинейным (в случае рессор) колебания с амплитудой 8… 12 мм. По сравнению с наклонными горизонтальные грохоты обеспечивают большую производительность при прочих равных условиях и лучшее качество грохочения.
Производительность грохотов определяют по пропускной способности сит, пропорциональной их площади и зависящей от размера отверстий, угла наклона грохота к горизонту и других факторов.
§
| Рис. 22.8. Схема вертикального классификатора с восходящим потоком жидкости |
 Гидравлические и гидромеханические классификаторыразличных типов применяют для разделения песка на фракции (классификации). На рис. 22.8 представлена принципиальная схема гидравлического вертикального классификатора с восходящим потоком жидкости. Водно-гравийно-песча-ную смесь (пульпу) подают в классификатор снизу через диффузор 4. В камере 2 скорость потока снижается, вследствие чего крупные частицы оседают в классификационной камере /, в которую по коллектору 5 подают чистую воду. Восходящий поток воды захватывает мелкие частицы и выносит их через верхний сливной коллектор 3 в обезвоживающую установку, а крупные частицы, выпавшие из потока в классификационной ка-
Гидравлические и гидромеханические классификаторыразличных типов применяют для разделения песка на фракции (классификации). На рис. 22.8 представлена принципиальная схема гидравлического вертикального классификатора с восходящим потоком жидкости. Водно-гравийно-песча-ную смесь (пульпу) подают в классификатор снизу через диффузор 4. В камере 2 скорость потока снижается, вследствие чего крупные частицы оседают в классификационной камере /, в которую по коллектору 5 подают чистую воду. Восходящий поток воды захватывает мелкие частицы и выносит их через верхний сливной коллектор 3 в обезвоживающую установку, а крупные частицы, выпавшие из потока в классификационной ка-
мере, выводятся по разгрузочному патрубку 6, обезвоживаются и транспортируются на склад. Границу разделения (0,5… 3 мм) регулируют количеством подаваемой в классификационную камеру воды и давлением водяного потока.
| Рис. 22.9. Схема гидроциклона |
Для разделения на фракции мелких песков применяют центробежные классификаторы — гидроциклоны(рис. 22.9). Водно-песчаную смесь подают в гидроциклон под давлением 0,1…0,2 МПа по патрубку 2 касательно к внутренней поверхности верхней части корпуса 1. Двигаясь по спирали, более крупные частицы за счет центробежных сил отбрасываются к периферии камеры, выпадают из потока и выгружаются через насадок 5. Мелкие частицы подхватываются вихревым потоком в средней части циклона и по центральной трубе 3 выводятся в сливной коллектор 4.
Каменные материалы промывают от засоряющих частиц либо 1 одновременно с сортировкой, либо выполняя эту операцию самостоятельно. Совмещенно промывают материалы крупностью до 70 мм, слабо загрязненные легкоотделимыми примесями. Для этого на грохот по трубам из сопел подают воду под давлением 0,2…0,3 МПа. Расход воды составляет 1,5…5 м3на 1 м3 промываемого материала.
В цилиндрических гравиемойках-сортировкахпромывают материалы крупностью 300…350 мм. Они представляют собой барабанный грохот с дополнительной моющей секцией с поверхностью без отверстий. Вода поступает в гравиемойку вместе с материалом. Расход воды — до 2 м3 на 1 м3 материала.

„ м Ч истый
Глина 1*7 материал
Рис. 22.10. Вибрационная мойка
Сильно загрязненные гравий и щебень моют в скрубберах — барабанах с лопастями на их внутренней поверхности. Воду подают навстречу движению материала. Производительность скрубберов — до 100 м3/ч.
Для промывки материалов со средне- и трудноотделяемыми включениями применяют вибрационные мойки(рис. 22.10) с установленными на пружинных опорах 2 под небольшим углом наклона к горизонту рабочими ваннами в виде двух параллельно расположенных труб 3, перфорированных в нижней части для слива размытой глины. Ванне сообщаются колебания от вибратора 6. Встряхиваемый материал промывается водой из брызгального устройства, расположенного в верхней зоне ванны. Промытый материал разгружается через порог 4 и лоток 5.
Контрольные вопросы
1.Какими параметрами характеризуется качество гравия и щебня?
Как классифицируют пески по крупности зерен? Для чего обезвоживают
песок и щебень?
2. Что такое степень дробления? Перечислите виды дробления по это
му параметру. Какими способами и какими машинами дробят (измель
чают) каменные материалы? Перечислите виды дробилок и мельниц.
Какими параметрами характеризуются дробилки? Для чего применяют
многостадийное дробление?
3. Для чего применяют, как устроены и как работают щековые, ко
нусные, валковые, роторные и молотковые дробилки? Как регулируют
размер разгрузочной щели? Какими мерами предохраняют дробилки от
поломок при попадании в камеру дробления недробимых предметов?
Назовите основные параметры дробилок. Приведите сравнительную оцен
ку эффективности дробилок различных типов. Как определяют их произ
водительность?
4. Какими способами сортируют каменные материалы? Что такое гро
хочение? Назовите виды просеивающей поверхности грохотов. Что такое
нижний и верхний классы? Что такое эффективность грохочения? Како
вы ее значения для применяемых грохотов? Что такое предварительное,
промежуточное и товарное грохочение? Перечислите схемы расположе
ния сит (решет) на грохотах и приведите их сравнительную оценку.
5. Приведите классификацию грохотов. В каких случаях их применяют
и каков принцип их действия? Приведите сравнительную оценку их эф
фективности.
6. Для чего применяют и каков принцип работы гидравлических клас
сификаторов и гидроциклонов?
7. Какими способами очищают каменные материалы от засоряющих
примесей? Какие машины для этого используют? Изложите схемы их
устройства и принцип действия.
Глава 23. МАШИНЫ И ОБОРУДОВАНИЕ
ДЛЯ ПРИГОТОВЛЕНИЯ БЕТОННЫХ СМЕСЕЙ
И СТРОИТЕЛЬНЫХ РАСТВОРОВ
23.1. Дозаторы
Бетон представляет собой искусственный каменный материал, получаемый из смеси вяжущих веществ, воды и заполнителей после ее формования и затвердевания. Строительные растворы не имеют в своем составе крупных заполнителей. До формования эти тщательно смешанные компоненты называют соответственно бетонной смесью и строительным раствором.
Приготовление бетонных смесей и строительных растворов состоит из дозирования компонентов и их перемешивания. Для дозирования применяют дозаторы, а для перемешивания — смесительные машины или смесители.
Дозаторыбывают объемными и весовыми. Первыми дозаторами материалы дозируют по объему, а вторыми — по массе. Объемные дозаторы более просты, но менее точны из-за непостоянства плотности и влажности дозируемых сыпучих материалов и условий заполнения мерных емкостей. Их применяют обычно для дозирования воды. Для дозирования сыпучих материалов их используют только в условиях строительных площадок для смесителей с объемом готового замеса до 250 л.
По режиму работы различают дозаторы цикличные (порционные) и непрерывного действия. В порционных дозаторах материал дозируется в мерном или весовом бункере, а в дозаторах непрерывного действия материал подают в смесители непрерывным потоком с заданной производительностью. Управляют дозаторами автоматически или полуавтоматически с пульта управления.
Весовой дозатор цикличного действияприменяют для порционного автоматического взвешивания цемента, заполнителей, химических добавок и воды, а также выдачи отвешенных порций в смесители (рис. 23.1). Компоненты дозируют поочередно, загружая весовой бункер 8 сначала материалом с более крупными размерами кусков, а затем — более мелкий, поверх первого. Сигнал на начало дозирования одного компонента поступает с пульта управления / к электропневматическому клапану 2, после срабатывания которого сжатый воздух от компрессорной установки по-
| Рис. 23.1. Функциональная схема весового дозатора цикличного действия |
ступает в пневмоцилиндр 3. Последний открывает впускной затвор 9 одного из бункеров 10 с дозируемым компонентом, который через воронку загружается в весовой бункер 8. Последний системой тяг и рычагов связан с весоизмерительным устройством 6 с циферблатным указателем. По достижении в весовом бункере требуемой дозы сигнал об окончании загрузки, сформированный задатчиком массы циферблатного указателя, поступает к пульту управления, который отключает клапан 2, а управляемый этим клапаном пневмоцилиндр 3 закрывает затвор, прекращая этим подачу материала в весовой бункер.
После перенастройки задатчи-ка массы циферблатного указателя так же дозируют второй компонент. Сигнал на разгрузку весового бункера поступает с пульта управления на электропневматический клапан 4, который открывает доступ сжатого воздуха в пневмоцилиндр 5. Последний открывает разгрузочный затвор 7, и отмеренные компоненты разгружаются в смеситель 6.
Дозаторы рассмотренного типа различаются пределом взвешивания, зависящим от вместимости весового бункера и других связанных с ним параметров. В качестве питателей при дозировании песка, щебня и т.п. применяют ленточные питатели и затворы различных конструкций. При дозировании цемента используют аэрожелоба, шнековые и барабанные питатели. При дозировании жидкостей применяют затворы, обеспечивающие необходимую герметичность.
Дозаторы непрерывного действиядля сыпучих материалов представляют собой какой-либо питатель или сочетание питателей, в которых автоматически с требуемой точностью поддерживается заданная производительность. Независимо от конструктивных особенностей дозаторы непрерывного действия включают в себя питатель, измерительное устройство производительности и САР.
На рис. 23.2 приведена схема дозатора цемента. Дозируемый материал подается на ленту ленточного питателя 2 из загрузочного бункера с помощью лопастных питателей /, в приводе которых установлен вариатор 16. Также вариатором 14 приводится в движение ленточный питатель. Производительность дозатора регулируют путем поддержания постоянного значения массы материала
 13 12 11 10
13 12 11 10
9 8 7
Рис. 23.2. Схема дозатора непрерывного действия для цемента
на ленте питателя 2 и изменения скорости движения ленты. Для стабилизации массы дозируемого материала ленточный питатель подвешен к раме дозатора шарнирно на оси приводного барабана и с помощью тяги — к коромыслу 3, уравновешенному грузом 6. При отклонении массы материала на ленте питателя от значения, соответствующего заданной производительности дозатора, коромысло отклоняется от своего равновесного положения, воздействуя на индуктивный преобразователь 5, с сердечником которого оно связано, в результате чего на вход бесконтактного электронного регулятора 8подается напряжение, отличное от нуля. Этот сигнал, пройдя тиристорный усилитель 9, включает двигатель 17 исполнительного механизма вариатора 16, передаточное отношение которого и, следовательно, частота вращения лопастных питателей будут изменяться до тех пор, пока масса материала на ленте питателя не достигнет заданного значения. Для устранения колебаний коромысла служит демпфер 4.
Для изменения скорости движения ленты служит автоматическая цепь из синхронного генератора 10, задатчика 11, регулятора 12, тиристорного усилителя 13 и исполнительного двигателя /5. Генератор вырабатывает сигнал переменного тока с частотой, пропорциональной частоте выходного вала вариатора. Выпрямленное напряжение сравнивается с напряжением задатчика, соответствующим установленной производительности. Разность этих напряжений подается на вход регулятора, который через тиристорный усилитель включает исполнительный двигатель, изменяющий передаточное отношение вариатора до достижения нулевого сигна-
40 5
 ла на входе регулятора. Общее количество подаваемого в смеситель материала регистрируется счетчиком 7, кинематически связанным с головным барабаном ленточного питателя.
ла на входе регулятора. Общее количество подаваемого в смеситель материала регистрируется счетчиком 7, кинематически связанным с головным барабаном ленточного питателя.
| Рис. 23.3. Схема универсального дозатора для заполнителей |
Универсальные дозаторы(рис. 23.3) применяют для дозирования заполнителей. Дозируемый материал поступает на ленточный питатель 5 из бункера 3 через затвор 4. Нагрузка от шарнирно подвешенного питателя воспринимается гру-зоприемным устройством 6 и фиксируется встроенным в него силоизмерительным датчиком, сигнал от которого поступает в умножитель 7. Второй, скоростной сигнал поступает на умножитель от тахогенератора 2 через преобразователь 8. Результат преобразования сигналов в умножителе поступает в блок задания и сравнения 13, в котором формируется сигнал, воздействующий на регулятор 14, управляющий приводом 15 вариатора 1 в кинематической цепи привода ленточного питателя. При работе в цикличном режиме сигнал с умножителя поступает в интегрирующий блок 12 и далее в блок задатчика дозы 11. По достижении заданного значения поданной массы материала регулятор 10 отключает двигатель 9 привода питателя.
Для дозирования жидкостей в установках небольшой производительности применяют компактные дозаторы турбинного типа на базе расходомеров воды, которые могут работать как в цикличном, так и в непрерывном режимах.
23.2. Смесители
В зависимости от вида приготовляемой смеси смесители подразделяют на растворосмесители — для приготовления штукатурных, кладочных, отделочных и других растворов и бетоносмесители — для приготовления бетонных смесей: обычных, сухих, ке-рамзитобетонных, ячеистых, особо тяжелых и др.
Смесители могут быть стационарными для работы в составе бето-носмесительных установок, заводов сборных железобетонных изделий (ЖБИ) и комбинатов крупнопанельного домостроения, перебазируемыми для объектов с небольшими объемами работ и мобильными (авторастворосмесители, автобетоносмесители). По режиму работы смесители могут быть цикличными и непрерывного действия.
В цикличных смесителяхисходные компоненты смешиваются отдельными порциями. Их главным параметром является вместимость смесительного барабана (по объему исходных компонен-
тов). Отечественная промышленность выпускает бетоносмесители вместимостью 100…4500 л и растворосмесители вместимостью 40… 1500 л.
В смесителях непрерывного действия исходные компоненты поступают непрерывно, также непрерывно выдается готовая смесь. Для приготовления смесей с различной рецептурой и частой сменой рецептов более приспособлены цикличные смесители. Их применяют на растворобетонных установках, заводах ЖБИ и в домостроительных комбинатах. Смесители непрерывного действия применяют в дорожном и энергетическом строительстве с ограниченным числом рецептов смеси (не более трех).
По принципу смешивания компонентов смесители подразделяют на гравитационные, принудительные и гравитационно-принудительные. Первые два типа могут быть как цикличного, так и непрерывного действия.
Наибольшее распространение в строительстве получили как гравитационные бетоносмесители цикличного действия, так и принудительные. В гравитационных смесителях рабочим органом является смесительный барабан с наклонной или горизонтальной осью вращения.
Гравитационный бетоносмесительс наклонной осью вращения (рис. 23.4, а) состоит из установленного на опорных стойках 4 смесительного барабана / с лопастями на его внутренней поверхности, приводимого во вращение электродвигателем 2 через систему зубчатых передач с конечной кинематической парой шестерня 5 —
Рис. 23.4. Гравитационный бетоносмеситель цикличного действия (а) и кинематическая схема его привода (б)
зубчатый венец 6 (рис. 23.4, б), охватывающий барабан. Для загрузки барабан устанавливают пневмоцилиндром 3 в слегка наклонное положение горловиной вверх. В таком же положении он находится во время смешивания компонентов. Для разгрузки барабана его прокидывают тем же пневмоцилиндром.
Исходные компоненты, загружаемые в смесительный барабан скиповым подъемником, смешиваются в барабане при его вращении лопастями, которые поднимают смесь на некоторую высоту, откуда она падает вниз, подхватывается другими лопастями и т.д. После перемешивания в течение 60…90 с готовую смесь выгружают из барабана, для чего его опрокидывают без остановки вращения. Продолжительность полного рабочего цикла, включающего загрузку исходных компонентов, их перемешивание и выгрузку готовой смеси, составляет 90… 150 с. Гравитационные смесители отличаются простотой устройства и обслуживания, способностью приготавливать смесь с крупными (до 120… 150 мм) заполнителями.
Смесители принудительного действияс вращающимися лопастными валами применяют для приготовления бетонных смесей и растворов практически любой подвижности и жесткости с крупностью заполнителя не более 70 мм. Различают смесители с вертикальными и горизонтальными лопастными валами. В настоящее время широкое распространение получили роторные смесители с вертикальными валами, работающие с повышенными скоростями движения рабочих органов. Эти машины особенно рекомендуется применять для приготовления жестких смесей.
В роторный смеситель(рис. 23.5) сухие компоненты подают через загрузочный патрубок 3, а воду — по кольцевой перфорированной трубе 4. Смесь перемешивается лопастями 12, установленными на державках 13 кронштейнов 2, в кольцевом пространстве, ограниченном внешней обечайкой 1 смесительной чаши и внутренним стаканом 10, футерованными сменными износостойкими плитами //. Несколько таких кронштейнов закреплены на траверсе 9, вращение которой передается от электродвигателя 6 через редуктор 5. Разгружают готовую смесь через секторный затвор 8, управляемый пневмоцилиндром 7.
Цикличные смесители с горизонтальным лопастным валоми турбулентные смесителиприменяют для приготовления строительных растворов. В смесителях первого типа (рис. 23.6) смесь перемешивается двумя винтовыми лопастями 3, установленными на валу 4, приводимом в движение от электродвигателя 2 через ременную передачу / и редуктор 5. Разгружают готовую смесь через затвор 6, управляемый пневмоцилиндром 7.
В турбулентный растворосмеситель(рис. 23.7) компоненты загружают через горловину в верхней части корпуса 1. При вращении лопастного ротора, приводимого в движение электродвига-
Рис. 23.5. Роторный смеситель
телем 2, перемешиваемые материалы совершают многократные перемещения в конической периферии корпуса, поднимаясь вверх по ней и оседая в центральной части. Разгружают готовый раствор через люк 3 при открытом затворе 4.
4 3
Рис. 23.6. Растворосмеситель с винтовыми лопастями
Производительность смесителей цикличного действия
П = VzkBkH,
где П — производительность смесителей цикличного действия, м3/ч; V — вместимость смесителя по загрузке, м3; z — число замесов в час; к&— коэффициент выхода смеси (*в = 0,75…0,85); &и — коэффициент использования смесителя во времени.
| Рис. 23.7. Турбулентный раство-росмеситель |
Смесителями непрерывного действиякомплектуют бетоно- и ра-створосмесительные установки производительностью до 30 м3/ч.
В горизонтальном двухвальном смесителе(рис. 23.8) компоненты смеси непрерывным потоком подают в корыто 8, в котором вращаются навстречу друг другу валы 6 с закрепленными на них лопастями 7, установленными под углом 40…45° к оси вала для перемещения смеси в процессе ее перемешивания к разгрузочному затвору 5. Валы приводятся во вращение электродвигателем / через ременную передачу 2, редуктор 3 и зубчатую пару 4. Техническая производительность смесителей непрерывного действия определяется объемом смеси, перемещаемым в единицу времени в осевом направлении, и зависит от размера лопастей, угла их установки и частоты их вращения.

Рис. 23.8. Горизонтальный двухвальный смеситель непрерывного действия (а) и кинематическая схема его привода (б)
23.4. Бетоно- и растворосмесительные заводы и установки
Процесс производства бетонов и растворов представляет собой ряд последовательных механизированных и в значительной мере автоматизированных операций, включающих погрузочно-разгрузочные работы при приеме и хранении сырьевых материалов на складах, их рыхление, подогрев в зимнее время, транспортирование компонентов смесей в расходные бункера смесительного узла, дозирование, перемешивание и выгрузку готовой смеси, аспирацию, обеспыливание линий движения материалов и вентиляцию производственных помещений.
Перечисленные работы составляют технологическое содержание работы бетоно- и растворосмесительных заводов и установок с законченным, расчлененным и комбинированным технологическими циклами. Продукцией предприятий с законченным циклом является готовая смесь, с расчлененным циклом — сухая смесь, на основе которой приготавливают бетонную смесь или строительный раствор в автобетоносмесителях в пути их следования на строительную площадку или в смесительных установках, расположенных в местах использования смесей; с комбинированным циклом — готовая и сухая смеси. Расчлененная технология производства целесообразна при большой удаленности строительного объекта от смесительного предприятия, так как при транспортировании готовой смеси в этом случае может ухудшиться ее качество.
В зависимости от назначения, мощностей и особенностей объектов-потребителей смесей различают стационарные постоянно действующие заводы, выпускающие товарные смеси, приобъектные установки, создаваемые на срок строительства объекта, и передвижные смесительные установки. Их классифицируют по режиму процесса приготовления смесей {периодического и непрерывного действия) и по технологической схеме компоновки оборудования {высотные и двухступенчатые). При высотной схеме исходные компоненты поднимают на полную высоту установки, после чего они по технологической цепочке движутся вниз только под действием силы тяжести. При двухступенчатой схеме сырьевые материалы поднимают сначала в расходные бункера, а затем, после дозирования, — в смеситель. Высотные схемы более компактны и лучше приспособлены для автоматизации производства, но они несколько дороже по капитальным затратам.
Заводы и установки, приготовляющие бетонную смесь с заполнителем крупнее 70 мм при водоцементном отношении В/Ц = = 0,45… 0,6 комплектуют гравитационными бетоносмесителями. Для приготовления жестких бетонных смесей используют роторные смесители. На приобъектных установках применяют небольшие смесители с барабанами вместимостью до 250 л.
Контрольные вопросы
1.Из каких компонентов приготавливают бетонные смеси и строи
тельные растворы? Какие типы машин и оборудования используют для
этого?
2. Приведите классификацию дозаторов. Чем они различаются между
собой по функциональным и конструктивным признакам? Для дозиро
вания каких компонентов и в каких условиях их применяют?
3. Изобразите и объясните функциональную схему весовых дозаторов
цикличного действия. Какие устройства применяют в этих дозаторах в
качестве питателей?
4. Из каких составных частей состоит дозатор непрерывного действия?
Объясните схемы устройства и принцип работы дозатора цемента и уни
версального дозатора для заполнителей.
5. Приведите классификацию смесителей и назовите предпочтитель
ные объекты их применения.
6. Назовите основные типы смесителей цикличного действия, опи
шите их устройство и принцип действия. Как определяют их производи
тельность?
7. Назовите основные типы и объекты применения смесителей не
прерывного действия. Как устроен и как работает горизонтальный двух-
вальный смеситель?
8. Перечислите работы, сопутствующие приготовлению бетонных и
растворных смесей. Назовите основные типы бетоно- и растворосмеси-
тельных заводов и установок и виды их продукции. Какая технологиче
ская схема используется при большой удаленности строительного объекта
от смесительного предприятия?
9. Назовите виды смесительных предприятий и приведите их класси
фикацию. Каковы особенности высотной и двухступенчатой технологи
ческих схем? Какими бетоносмесителями комплектуют бетонные заводы
и установки?
§
Бетононасосные установки представляют собой комплекты устройств для транспортирования бетонных смесей по трубам к месту укладки и их распределения. В состав установки входит собственно бетононасос, комплект бетоноводов и распределительные механизмы — манипуляторы. Подача бетонной смеси по трубам нагнетателями позволяет исключить ручной труд при приеме, перемещении и укладке смеси, сохранить ее качество и исключить потери, повысить в 2—3 раза производительность труда и снизить стоимость бетонных работ. К достоинствам этого способа транспортирования бетонной смеси относятся: возможность подачи смеси в малодоступные и практически недоступные при других способах места, регулирование в соответствии с потребностью интенсивности подачи бетонной смеси, исключение ее расслоения и защита от атмосферных осадков, меньшая загрязненность строительной площадки остатками смеси. К недостаткам относится относительно большая стоимость оборудования, необходимость очистки и промывки транспортной системы при каждой остановке в работе на время, превышающее время схватывания бетонной смеси, необходимость высокой квалификации обслуживающего персонала.
Бетононасосы классифицируют по режиму работы (с периодической и непрерывной подачей смеси), по типу привода (с гидравлическим и реже механическим приводом), по мобильности (стационарные и передвижные).
Бетононасосы с периодической подачеймогут быть одно- и двухцилиндровыми. В последнее время серийно выпускаются преимущественно двухцилиндровые поршневые бетононасосы с гидравлическим приводом. Принципиальная схема работы таких насосов представлена на рис. 24.1. Каждый из двух бетонотранспорт-ных цилиндров 4 спарен с приводным гидроцилиндром 2 так, что их поршни посажены на общий шток. Между гидроцилиндрами 2 и бетонотранспортными цилиндрами 4 установлена промывочная камера 3, заполненная водой для очистки внутренних поверхностей бетонотранспортных цилиндров, работающих поочередно так, что при всасывающем такте одного второй совер-

Рис. 24.1. Принципиальная схема работы двухцилиндрового бетононасоса:
а — такт всасывания бетонной смеси в левый цилиндр и нагнетания из правого; б — такт всасывания смеси в правый цилиндр и нагнетания из левого
шает нагнетание. Различные модели двухцилиндровых бетононасосов различаются между собой, в основном, конструкцией распределительных устройств, одно из которых в виде двух шиберных заслонок 5 и 7, управляемых гидроцилиндром 6, показано на рис. 24.1. Заслонки поочередно соединяют поршневые полости бетон отранспортных цилиндров с бетоноводом и приемным бункером 1.
Подача поршневых насосов
Q = 60 VznkH,
где Q — подача поршневых насосов, м3/ч; V — рабочий объем бетонотранспортного цилиндра; z — число цилиндров; п — число двойных ходов поршня в минуту; кн — коэффициент наполнения цилиндра смесью.
В бетононасосах непрерывного действия,называемых также шланговыми или перистальтическими (рис. 24.2), рабочий процесс всасывания из бункера 7 и нагнетания бетонной смеси в бетоновод осуществляется за счет упругой деформации гибкого шланга 2, уложенного на жесткий ложемент 4, при перекатывании по нему

Рис. 24.2.Принципиальная схема перистальтического бетононасоса
роликов 6 на цепи 5, приводимой звездочкой 3. При этом бетонная смесь всасывается в шланг вслед за перемещающимся роликом под действием разрежения внутри шланга при его упругом восстановлении после прохода ролика и выталкивается в бетоновод передним фронтом бегущей волны сжатия шланга.
| Рис. 24.3. Схемы возможной раскладки шарнирносочлененной стрелы |
К достоинствам перистальтических насосов относятся: пониженный расход энергии вследствие равномерной подачи бетонной смести, простое исполнение и обслуживание. К их недостаткам относятся: высокие требования к составам и подвижности перекачиваемых смесей, небольшое давление, ограничивающее даль-
ность подачи, малый срок службы гибкого шланга на участке рабочей камеры бетононасоса. Обычно шланг заменяют после перекачки 2000… 3000 м3 бетонной смеси. Преимущественная область применения перистальтических насосов — перекачивание тощих бетонных смесей, а также смесей с гравийным заполнителем для устройства бетонных стяжек, покрытий и т. п. в гражданском и промышленном строительстве. Они работают с подачей до 60 м3/ч бетонной смеси на высоту до 30 м с давлением до 3,5 МПа по шлангу диаметром 125 мм.
Подают бетонную смесь от бетононасоса к месту ее укладки по бетоноводу из стальных труб, соединенных между собой замками.
Для расширения сферы применения бетононасосов быстрого перебазирования и повышения коэффициента использования их устанавливают на буксируемых прицепах или автомобилях, оборудованных распределительными стрелами. Стрела служит опорой для бетоновода и концевого раздаточного шланга. Стрелы бывают сборными, телескопическими и шарнирно сочлененными из двух и более звеньев общей длиной до 40 м. Шарнирно сочлененные стрелы наиболее просты в монтаже на строительной площадке и маневренны. Звенья стрел могут раскладываться под различными углами, что позволяет без перемонтажа бетоновода направлять концевой шланг в любую точку в пределах зоны обслуживания стрелы (рис. 24.3).
24.2. Машины и оборудование для укладки и распределения бетонной смеси
Для подачи и распределения бетонной смеси применяют краны, оснащенные бадьями, ленточные конвейеры, виброжелоба, самоходные бетоноукладчики и оборудование трубопроводного транспорта.
Наиболее широкое применение (85 % общего объема бетонной смеси) при сооружении строительных объектов из монолитного бетона и железобетона имеют строительные краны с поворотными и неповоротными бадьями (бункерами).
Поворотные бадьигрузоподъемностью 1,25…5 т загружают бетонной смесью из автосамосвалов (рис. 24.4) или бетоновозов, транспортирующих ее с бетонного завода на строительную площадку. Разгружают бадью открыванием затвора.
Неповоротные бадьигрузоподъемностью 1,25…2,5 т загружают смесью в вертикальном положении как на бетонном заводе, так и на строительном объекте. На корпусе некоторых бадей устанавливают вибратор, который облегчает их разгрузку. Неповоротные бадьи оборудованы ручным рычажным приводом. Используют также гидравлический привод от гидроаккумулятора, заряжаемого от нагрузки при подъеме бадьи краном.
Гидрофицированные перегрузочные бункеравместимостью 2… 6 м3 применяют для перегрузки бетонной смеси с автотранспортных средств в неповоротные бадьи, тележки, приемные бункеры бетононасосов и другие средства подачи.
Накопительные бункерас боковой или нижней разгрузкой используют для сокращения простоев приобъектных бетоносмеси-
тельных установок и времени загрузки средств приобъектной подачи бетонной смеси. Их устанавливают под бетоносмесителем или вблизи бетонируемых конструкций. Из этих бункеров загружают транспортные средства для подачи смеси к местам ее укладки.
В некоторых случаях (при устройстве плит и полос на фунтовом основании, ленточных и столбчатых фундаментов, бетонируемых в распор и т. п.) смесь подают в опалубку непосредственно из автотранспортных
Рис. 24.4. Выгрузка бетонной смеси средств без специальных бетоно-
в поворотную бадью укладочных устройств или с ис-
пользованием неповоротных и поворотных лотковдлиной до 3 …4 м. Этот способ подачи смеси самый простой. Его недостатком является возможное расслоение бетонной смеси при скольжении по наклонной поверхности, а также при падении с большой высоты.
Весьма эффективно для этих целей применять вибрационные установки,в состав которых входят виброжелоба, вибропитатели и опорные элементы. Виброжелоба с полукруглым поперечным сечением, оборудованные автономными вибропитателями, устанавливают под углом к горизонту 5…20° последовательно один за другим, подвешивая их к опорным элементам на пружинных амортизаторах. Последний виброжелоб устанавливают на поворотную телескопическую стойку. Производительность виброжелобов при оптимальной толщине слоя смеси 20…23 см зависит от угла их наклона и подвижности бетонной смеси и составляет 5…45 м3/ч. Во многих случаях оказывается выгодным сочетание виброжелобов с легкими кранами по сравнению с работой тяжелых кранов с большим радиусом действия. Виброжелоба применяют также в сочетании с бетононасосами, сокращая этим объем перекладки трубопроводов в зоне бетонирования. При подаче смеси автосамосвалами с эстакад благодаря виброжелобам можно уменьшить протяженность последних.
Если на строительном объекте уровень подъездных путей значительно превышает уровень блоков бетонирования, то бетонную смесь подают самотеком. При спуске с высоты до 10 м и диаметром проходного сечения 300 мм, способного пропускать заполнитель размером до 100 мм применяют звеньевые хоботыдлиной звеньев 0,6… 1 м. При спуске с высоты более 10 м применяют виброхоботы,представляющие собой гибкие трубопроводы из звеньев труб диаметром 350 мм с гасителями, снижающими скорость падения смеси.
При бетонировании массивных конструкций для подачи бетонной смеси весьма эффективны ленточные конвейерыс лотковым поперечным сечением рабочей ветви ленты, обеспечивающие большую производительность и меньшую стоимость работ, чем при подаче кранами. Ленточные конвейеры располагают последовательно один за другим, образуя любую конфигурацию транспортной системы в соответствии с местной ситуацией. Ленточными конвейерами транспортируют малоподвижные и жесткие бетонные смеси без ограничения крупности заполнителей. В отличие от бетононасосов, при использовании которых технологические перерывы в подаче бетонной смеси нежелательны, ленточные конвейеры могут подавать ее с любыми перерывами. Для защиты бетонной смеси от воздействия ветра, солнечной радиации, дождя, отрицательных температур при ее транспортировании ленточными конвейерами последние монтируют в галереях либо устанавливают над ними защитные кожухи. Зимой, кроме того, предусматривают мероприятия по утеплению и обогреву. Для предотвращения расслоения бетонной
смеси при ее перегрузке с одной секции на другую, а также при ее разгрузке используют сужающиеся книзу воронки или хоботы, направляющие смесь вертикально без скольжения. Наиболее распространены три типа ленточных конвейеров: секционные, наклонные передвижные и мостовые с боковой разгрузкой.
Конвейеры,составленные из секций длиной 9… 25 м при ширине ленты 400…450 мм применяют для подачи бетонной смеси на расстояния от нескольких десятков метров до 1 …2 км. Они состоят из унифицированных элементов с автономным приводом. Известны также конвейерные системы с шириной ленты 720 мм. Для подачи на значительную высоту для сокращения длины транспортирования используют наклонные конвейерыс рифленой поверхностью ленты.
При бетонировании монолитных конструкций подземной части зданий используют самоходные стреловые бетоноукладчикина базе гусеничных тракторов, кранов, экскаваторов или специальных самоходных пневмошасси. Бетоноукладчик (рис. 24.5) состоит из базового шасси 1, надстройки 2 со скиповым ковшом 3 для приема бетонной смеси и загрузки вибробункера 4 и стрелы 6, один конец которой расположен под затвором бункера на поворотном устройстве 7. Вдоль стрелы смонтирован ленточный конвейер. Стрела и ленточный конвейер могут быть одно- и двухсекционными или телескопическими. С помощью полиспаста 5 стрела может занимать различные положения по высоте, а с помощью поворотного устройства — также различные положения в плане.
Производительность бетоноукладчиков
П = 3600 Avtp/tu,
| Рис. 24.5. Самоходный бетоноукладчик |
где П — производительность бетоноукладчиков, м3/ч; Аи v — соответственно площадь поперечного сечения потока бетонной смеси, м2, и его скорость, м/с, на сходе с разгрузочного барабана
конвейера; tp — продолжительность чистой работы конвейера, с; tn— продолжительность рабочего цикла, включающего вспомогательные (не совмещенные с основными) операции (перемещение бетоноукладчика на новую позицию, поворот стрелы в плане и вертикальной плоскости, изменение вылета телескопической стрелы, загрузка приемного устройства и связанные с ней операции по перемещению бетоноукладчика), с.
Производительность отечественных бетоноукладчиков составляет от 9 до 100 м3/ч при дальности подачи до 30 м.
§
При укладке бетонную смесь разравнивают и уплотняют для получения бетона с морозостойкой, водонепроницаемой и прочной структурой путем удаления из смеси воздуха, объем которого в пластичных смесях достигает 10… 15 %, а в жестких — 40…45 %. Наиболее универсальным и эффективным способом уплотнения является вибрирование, реже применяют вакуумирование.
По способу воздействия на бетонную смесь различают внутренние (глубинные), наружные и поверхностные вибраторы. Внутренние вибраторы, погруженные в смесь, передают ей колебания вибронаконечником или корпусом, наружные вибраторы прикрепляют болтами или другими способами к опалубке для передачи через нее колебаний бетонной смеси, поверхностные вибраторы, устанавливаемые на уложенную смесь, передают ей колебания через рабочую площадку. Внутреннее вибрирование наиболее выгодно, так как вся энергия вибровозбудителя передается уплотняемой смеси с минимальными потерями. Наружные вибраторы используют в строительстве редко из-за повышенных требований жесткости и прочности опалубки и больших затрат ручного труда на их установку. Их применяют, в частности, при омоноличивании стыков сборных железобетонных колонн и обетонировании их стальных сердечников. Поверхностные вибраторы применяют для послойного уплотнения плоских монолитных конструкций (плит, полов, и т.п.) при глубине прорабатываемого слоя до 20 см.
Вибраторыразличают по способу создания колебаний: вращающимися дебалансами и возвратно-поспупательным движением массы. Дебалансные вибраторы могут быть одновалъными — для создания круговых колебаний и двухвальными — для направленных колебаний. Они приводятся в действие электродвигателями {электромеханические вибраторы), пневмодвигателями (пневматические вибраторы) или двигателями внутреннего сгорания. Вибраторы с возвратно-поступательным направленным движением массы имеют электромагнитный привод (электромагнитные вибраторы). Наиболее широкое применение в строительстве для работы непосредственно на строительной площадке получили переносные элект-
ромеханические вибраторы с круговыми колебаниями. Реже применяют пневмовибраторы. Строительные вибраторы различают по частоте колебаний их корпуса: низкочастотные (2800…3500 колебаний в минуту), среднечастотные (3500…9000 мин~’), высокочастотные (10 000… 20 000 миьг1). Последние применяют преимущественно для уплотнения мелкозернистых смесей в тонкостенных конструкциях. Глубинные вибраторыприменяют при бетонировании крупногабаритных или густо насыщенных арматурой железобетонных конструкций (фундаментов, стен, массивных плит, колонн, свай и т.п.). Их также используют при стендовом способе производства железобетонных изделий. Глубинные вибраторы бывают ручными (массой до 25 кг) и подвесными в виде пакетов из 3… 15 вибраторов на одной траверсе (рис. 24.6) при бетонировании массивных бетонных и железобетонных конструкций малоподвижными смесями. У ручных вибраторов электродвигатель 2 обычно трехфазный асинхронный с ко-роткозамкнутым ротором встроен в корпус (наконечник /) вибратора (рис. 24.7, а) или вынесен (рис. 24.7, 6) (с соединением с дебалансом рабочего наконечника / гибким валом 3). Рабочий наконечник (рис. 24.8) представляет собой герметически закрытый цилиндрический корпус с дебалансом внутри. Для уплотнения бетонной смеси в тонкостенных и густоармированных конструкциях применяют планетарные вибраторы, в которых вибрация создается плане-тарно обкатывающимся бегунком / относительно сердечника 2,
или втулки 3. Вибраторы с пневмоприводом (см. рис. 24.7, в) приводятся в движение пластинчатым пневмомотором, составляющим одно целое с бегунком 7, обкатывающимся по внутренней поверхности корпуса 4. Сжатый воздух подается от компрессора по шлангу б в рабочую камеру 12 пластинчатого пневмомотора, а отработанный — через выхлопную камеру 11 по шлангу 5 выводится в атмосферу. Статор 9 с одной лопаткой 10 закреплен неподвижно, а ротор (бегунок) 8 обкатывается вокруг статора. Основным недостатком пневмо-вибраторов является повышенный уровень шума и высокая энергоемкость.
Уплотняют бетонную смесь Рис. 24.6. Малогабаритный электриче- вертикальным или наклонным ский трактор с пакетом вибраторов погружением вибронаконечни-
| Рис. 24.7. Глубинные вибраторы: а — с встроенным электродвигателем; б — с вынесенным электродвигателем; в — с пневмоприводом |
ка в уплотняемый слой с частичным (на 5… 10 см) заглублением в ранее уложенный и еще не схватившийся слой. В зависимости от подвижности или жесткости смеси продолжительность работы вибратора на одной позиции составляет 20…40 с, увеличиваясь с уменьшением подвижности и увеличением жесткости. Шаг позиционирования назначают не более полуторного радиуса действия вибратора.
Общим недостатком глубинных вибраторов является сравнительно небольшой радиус их действия и, следовательно, небольшая производительность. Для повышения радиуса действия (в 1,3—
1,5 раза) корпуса некоторых глубинных вибраторов делают ребристыми.
Для уплотнения бетонных смесей средней подвижности толщиной до 20 см при бетонировании покрытий и в дорожном строительстве применяют площадочные вибраторы и виброрейки (рис. 24.9).
Площадочный вибраторпредставляет собой стальную плиту с закрепленным на ней вибровозбудителем. На виброрейке,имеющей более удлиненное основание, устанавливают несколько вибровозбудителей, соединенных между собой валами. Для уплотнения смесей на вибропрокатных станах и при стендовом способе производства железобетонных изделий используют вибронасадки,уплотнение смесей которыми сочетает в себе два способа — объемный и поверхностный. Вибронасадки приводятся в действие вибровозбудителем общего назначения. Смесь в вибрируемом бункере 2 подвергается объемному уплотнению и в таком виде в состоянии текучести поступает под заглаживающую часть вибронасадка 1 для поверхностного уплотнения.
| Рис. 24.8. Вибронаконечники планетарных вибраторов с внутренней (а) и наружной (б) обкаткой |
Вакуумированиеприменяют, в основном, для устройства бетонных полов толщиной до 300 мм путем удаления из одновременным уплотнением под
бетонной смеси части воды с действием атмосферного давления через отсасывающие плиты. Реализующее этот процесс оборудование (вакуум-агрегат и вакуум-маты) обычно используют вместе с виброрейкой и затирочными машинами (см. гл. 25).
Вакуум-агрегатсостоит из вакуумного бака и гидробака с вакуум-насосом. Отсасывающий вакуум-мат представляет собой филь-

Рис. 24.9. Схемы оборудования для поверхностного уплотнения бетонных
смесей: а — площадочный вибратор; б — виброрейка; в— вибронасадок
трующее полотнище с отверстиями, объемно-профилированной пластмассовой сеткой и верхним герметизирующим матом с рукавом для отвода водовоздушной смеси. Вакуум-матом накрывают обработанный виброрейкой участок пола, после чего включают вакуум-насос. Вследствие разрежения в полости отсасывающего мата водовозушная смесь по гибкому рукаву отсасывается из бетонного покрытия и поступает в вакуумный бак, где вода фильтром отделяется от воздуха и стекает в гидробак.
Контрольные вопросы
1. Назовите состав бетононасосных установок. Какими преимущества
ми и недостатками обладает способ транспортирования бетонных смесей
с применением бетононасосных установок? Приведите классификацию
бетононасосов. Какие из них наиболее распространены в строительстве?
2. Как устроены и как работают двухцилиндровые бетононасосы?
3. Как определяют производительность поршневых бетононасосов?
4. Как устроены и как работают перистальтические бетононасосы?
Каковы их достоинства и недостатки?
5. Для чего применяют распределительные стрелы? Каков принцип их
действия?
6. Какими техническими средствами подают и распределяют бетон
ную смесь? Охарактеризуйте подачу бетонной смеси с использованием
бадей, перегрузочных и накопительных бункеров. Назовите области при
менения лотков, виброжелобов, звеньевых и вибрационных хоботов,
ленточных конвейеров, самоходных стреловых бетоноукладчиков. Оха
рактеризуйте их рабочие процессы. Как определяют производительность
самоходных бетоноукладчиков?
7. Какими способами уплотняют бетонную смесь? Приведите класси
фикацию вибраторов для уплотнения бетонных смесей. Каков принцип
их действия?
8. Для чего предназначены, как устроены и как работают глубинные
вибраторы? Каковы их достоинства и недостатки?
9. Какое оборудование применяют для поверхностного уплотнения
бетонных смесей? Как оно устроено и как работает?
§
Механизация штукатурных работ включает приготовление растворов, доставку их на строительные объекты, подачу к рабочим местам, нанесение на обрабатываемые поверхности и их отделку. При больших объемах штукатурных работ раствор приготавливают централизованно на специализированных заводах или растворных узлах, откуда его доставляют на строящийся объект специализированными транспортными средствами — авторастворовоза-ми (см. гл. 8) или автотранспортом общего назначения в оборотной или штучной таре. При небольших объемах работ или значительной удаленности растворного узла раствор готовят на строительном объекте в растворосмесителях (см. гл. 23).
В комплект оборудования для штукатурных работ входят: штукатурные станции или агрегаты, поэтажные станции перекачки и нанесения растворов на поверхности и затирочные машины.
Штукатурные станцииприменяют для приема раствора, его хранения, перемешивания с введением необходимых добавок, транспортирования к рабочему месту и нанесения на обрабатываемую поверхность. Оборудование монтируют на автоприцепе или на полозьях.
В составе штукатурных станций применяют объемные противо-точные насосы {одно- и двухцилиндровые и дифференциальные), характеризуемые плавностью подачи, хорошей всасывающей способностью и высоким ресурсом работы цилиндро-поршневой группы (до 2000 маш. -ч).
В отличие от прямоточных насосов, в которых направление движения раствора на входе в рабочую камеру и выходе из нее совпадает с направлением силы тяжести, у противоточных насосов эти направления не совпадают.
Принципиальная съема одноцилиндрового противоточного поршневого растворонасоса с подачей 2…4 м3/ч приведена на рис. 25.1. Насос приводится в действие электродвигателем / через клино-ременную передачу 2 и двухскоростной редуктор 4. Возвратно-поступательное движение поршню 14 рабочего цилиндра 16 сообщается соединенным с его штоком 6 шатуном 5 от кривошипа выходного вала редуктора. Рабочая камера 15 перекрывается от
Рис. 25.1. Принципиальная схема одноцилиндрового противоточного поршневого растворонасоса
всасывающего патрубка 8 шаровым клапаном 9, а от нагнетательного трубопровода (растворовода) 10 — клапаном 13. При движении поршня вправо в рабочей камере создается разрежение, вследствие чего нагнетательный клапан 13 прижимается к своему седлу, а всасывающий клапан 9 приподнимается, пропуская в рабочую камеру раствор через всасывающий патрубок. При движении поршня влево в рабочей камере создается избыточное давление, вследствие чего клапан 9 закрывается под действием собственной силы тяжести, а клапан 13 приподнимается, пропуская раствор в растворовод. Для снижения пульсации движения раствора служит воздушный ресивер 11, в который систематически подкачивают воздух, контролируя его давление манометром 12. Рабочий цилиндр охлаждается водой в охватывающей его камере 7. Подачу насоса изменяют дискретно переключением передач в редукторе 4. Для предохранения насоса от поломок, например, при образовании в раствороводе пробок, в трансмиссию привода включена предохранительная муфта 3, которая срабатывает в экстремальных случаях, отключая насос от двигателя.
Двухцилиндровые растворонасосы отличаются от одноцилиндровых числом рабочих цилиндров со своими рабочими камерами, работающими поочередно на один растворовод, благодаря чему повышается плавность подачи раствора.
У двухцилиндровых дифференциальных растворонасосов рабочие камеры соединены последовательно так, что раствор, поступивший в первую рабочую камеру нагнетается во вторую камеру, а из нее — в растворовод. Они обеспечивают подачу раствора на высоту до 100 м или на 300 м по горизонтали при давлении до 4 МПа.
 Подача поршневых про-тивоточных растворонасосов
Подача поршневых про-тивоточных растворонасосов
0 = 5nd2snkH,
где Q — подача поршневых противоточных растворонасосов, м3/ч; dns—диаметр поршня, м и его ход, м; п — число ходов поршня в минуту; к^ — коэффициент объемного наполнения {кп =0,7…0,85).
| Рис. 25.2. Пневматический растворона-гнетатель |
Для подачи жестких растворов штукатурные станции оборудуют пневматическими нагнетателями (рис. 25.2). Рабочую емкость 7, представляющую собой лопастной смеситель принудительного действия, заполняют сухими
компонентами (вяжущим и песком) и водой, после чего ее закрывают крышкой 2, через краны 3 и 7 нагнетают внутрь сжатый воздух и приводят во вращение вал 6 с лопастями 5. Готовую смесь вместе с воздухом выпускают в растворовод 8 через кран 9. На выходе из растворовода скоростной напор смеси уменьшается посредством гасителя 10. При превышении давления в емкости более 0,7 МПа воздух стравливается в атмосферу через предохранительный клапан 4. Пневматические нагнетатели обеспечивают подачу раствора 2,5…8 м3/ч на высоту до 80 м или на расстояние до 200 м по горизонтали. В состав штукатурной станции включен также компрессор для подачи сжатого воздуха к пневморас-пылительным форсункам при нанесении раствора на оштукатуриваемую поверхность.
Передвижные агрегаты цикличных смесителей принудительного перемешиванияс оп-
Рис. 25.3. Растворонасос с качающимся рокидными барабанами при-
цилиндром: меняют для приготовления ра-
а — всасывание; б — нагнетание створов ИЗ местных КОМПО-
Рис. 25.4. Винтовой растворонасос
нентов непосредственно на строительном объекте. Для транспортирования составов и их нанесения на обрабатываемые поверхности применяют объемные поршневые противоточные (рис. 25.3) (с подачей до 3 м3/ч при дальности до 100 м по горизонтали и до 30 м по вертикали) и винтовые (с подачей до 1 м3/ч при дальности до 100 м по горизонтали и до 50 м по вертикали) растворонасосы.
Винтовые растворонасосы (рис. 25.4) используют для перекачивания как штукатурных растворов на гипсовых вяжущих, так и разного рода замазок, шпатлевок, мастик и малярных составов. Рабочим органом растворонасоса является винт 3, вращающийся в резиновой обойме 2 от электродвигателя 7 через редуктор 6. Материал загружают в бункер 1, где он подается шнековым питателем 5 к винтовой паре и далее — в растворовод. При изнашивании внутренней рабочей полости обоймы ее поджимают стяжным хомутом 4.
Поэтажные штукатурные агрегаты(рис. 25.5) применяют при небольших объемах штукатурных работ. Агрегат состоит из двух основных сборочных единиц: растворонасоса / и приемного бункера 5, смонтированных на колесах и соединенных резиноткане-
Рис. 25.5. Поэтажный штукатурный агрегат
вым рукавом 6. Растворонасос, обычно противоточный, с непосредственным воздействием поршня на раствор, укомплектован ресивером 3 и пультом управления 2. Готовый раствор загружают на вибросито 4, установленное в верхней части приемного бункера. Агрегат обеспечивает подачу до 1 м3/ч раствора на расстояние до 15 м по вертикали или до 50 м по горизонтали.
Для нанесения штукатурных растворов на поверхность применяют воздушные (компрессорные) и безвоздушные {бескомпрессорные) форсунки (рис. 25.6). В полость наконечника-сопла воздушной форсунки (см. рис. 25.6, а) по двум каналам одновременно подается раствор (по каналу 3) и сжатый воздух (по трубке 2). Последний при выходе из сопла 1 распыляет раствор, образуя факел, что способствует равномерному нанесению раствора на поверхность. Размеры факела регулируют изменением расхода сжатого воздуха или изменением расстояния между воздушной трубкой 2 и выходным отверстием сопла. Воздушные форсунки применяют для нанесения на оштукатуриваемую поверхность растворов подвижностью 6… 12 см при крупности песка до 2,5 мм.
Бескомпрессорные форсунки(см. рис. 25.6, б) используют для работы с более подвижными растворами. По сравнению с воздушными форсунками они более просты, но не обеспечивают ста-


Рис.25.6. Штукатурные форсунки: а — компрессорная с центральной подачей сжатого воздуха; б — бескомпрессорная
бильного факела, что приводит к неравномерному нанесению раствора и частому засорению сопел.
Нанесенный на оштукатуриваемую поверхность раствор разравнивают вручную, после чего наносят накрывочный слой, который разравнивают ручными штукатурно-зати-рочными машинами— пневматическими и электрическими (рис. 25.7).
| Рис. 25.7. Штукатурно-затироч-ная машина с электроприводом |
Рабочим органом электрической затирочной машины является вращающийся диск, к которому через штуцер в одной из рукояток подводится вода для смачивания затираемой поверхности. При повышенных требованиях к оштукатуренным поверхностям в отношении водо- и газонепроницаемости, жаростойкости и кислотоупорности, а также повышенной механической прочности применяют торкретные установки. Всостав установки входят: цемент-пушка, компрессор, бак для воды, гибкие шланги для сухой смеси, воды, воздуха и сопла.
Компоненты поступают в рабочую камеру сопла раздельно, где они смешиваются и под действием сжатого воздуха выбрасываются из сопла, с силой ударяясь о покрываемую поверхность. Обычно поверхности оштукатуривают послойно, нанося каждый последующий слой после начала схватывания предыдущего. Торкретные установки обеспечивают подачу 1,5…4 м3/ч сухой смеси на расстояние до 200 м по горизонтали и до 80 м по вертикали при рабочем давлении сжатого воздуха 0,4 МПа.
§
Малярные работы включают подготовку поверхностей под окраску (ее очистку, снятие наплывов, расшивку трещин и подмазку отдельных мест, проолифку, нанесение слоя шпатлевки с ее разравниванием и шлифованием), приготовление шпатлевочных и малярных составов, огрунтовку и собственно окраску.
Подлежащие окраске поверхности очищают от пыли сжатым воздухом или щетками, а сильно загрязненные поверхности — шлифовальными машинами или металлическими электрощетками.
Наплывы снимают ручными электрическими или пневматическими молотками. При необходимости на бетонных поверхностях делают насечку для лучшего сцепления наносимого на них слоя шпатлевки.
Малярные составы приготавливают в централизованных цехах производственных предприятий строительных организаций,
приобъектных колерных мастерских и на передвижных малярных станциях.
Централизованное предприятие оснащено в основном стационарным оборудованием. В состав оборудования приобъектных колерных мастерских и передвижных малярных станций входят: ме-лотерки, краскотерки, смесители, насосы-эмульгаторы, электроклееварки, вибросита, а также средства механизации для транспортирования и нанесения составов.
При больших объемах работ и централизованной доставке шпатлевки в полиэтиленовой таре для шпатлевочных работ применяют малярные агрегаты,состоящие из размещенного в технологической последовательности оборудования для дозирования, транспортирования и нанесения отделочных материалов на обрабатываемые поверхности пневматическими или безвоздушными распылителями.
Агрегаты изготовлены на базе винтовых насосов и комплектуются применительно к конкретным условиям работы для определенных объемов и отделочных материалов. Они обеспечивают подачу до 0,4 м3/ч при дальности до 80 м по горизонтали или до 50 м по вертикали.
При небольших объемах работ применяют шпатлевочные установки(рис. 25.8) передвижные (на колесах). Установка состоит из двух герметично закрываемых баков 2 с распределительными аппаратами /, удочки 7, соединяющего их материального рукава 5 и

-8 7 6 5
Рис. 25.8. Установка для нанесения жидкой шпатлевки
воздушных шлангов 3 и 6, соединяющих баки и удочку с компрессором, который не входит в состав установки. Шпатлевку наносят на обрабатываемую поверхность поочередно, сначала расходуя материал из одного бака, а после переключения рукояткой 4 распределителя — из другого бака. После загрузки бака жидкой шпатлевкой и его герметизации в него подают сжатый воздух, под давлением которого шпатлевка поступает через распределительное устройство к головке 8 удочки, где она увлекается воздухом, подаваемым через шланг 6, и в распыленном состоянии наносится на обрабатываемую поверхность. Производительность установки составляет до 200 м3/ч обработанной поверхности при рабочем давлении сжатого воздуха 0,7 МПа и расходе 0,5 м3/мин. Установка может быть также применена для нанесения на обрабатываемые поверхности синтетических, водно-меловых и водно-известковых окрасочных составов.
Для поэтажной подачи и нанесения на обрабатываемые поверхности шпатлевок подвижностью от 7 см и более, а также грунтовых и водоклеевых красочных составов применяют передвижные шпатлевочные агрегатына базе винтовых насосов. Шпатлевку наносят распылением с помощью сжатого воздуха, подаваемого к удочке от компрессора под давлением 0,5…0,7 МПа. При нанесении грунтовок и водных красочных составов сжатый воздух не используют, так как для распыления достаточно давления, развиваемого насосом (2 МПа).
Для окраски поверхностей применяют окрасочные агрегатыс распылением окрасочных составов и нанесением их на окрашиваемые поверхности краскораспылителями или удочками. Различают переносные и передвижные, пневматические и безвоздушного распыления окрасочные агрегаты. Все агрегаты отечественного производства имеют, как правило, электрический привод.
Передвижной окрасочный агрегат по устройству и принципу действия сходен с передвижной шпатлевочной установкой. Передвижные окрасочные агрегаты работают от воздушных компрессоров с подачей воздуха до 0,5 м3/мин и рабочим давлением 0,4 МПа. Вместимость красконагнетательного бака 16… 100 л. Производительность агрегата достигает 500 м2/ч окрашенной поверхности.
При небольших объемах окрасочных работ применяют переносные окрасочные агрегаты производительностью до 50 м2/ч окрашенной поверхности, работающие от диафрагменного компрессора с подачей воздуха до 0,05 м3/мин при рабочем давлении 0,4 МПа. Вместимость бачка для краски составляет 0,7 л.
Рабочими органами окрасочных агрегатов являются пневматические краскораспылители низкого (до 0,1 МПа) и высокого (более 0,1 МПа) давления. Пневматические краскораспылители различного назначения (для окраски фасадов домов, стен промышленных зданий, крупных металлоконструкций; для окрашивания
| Рис. 25.9. Пневматический краскораспылитель |
 приборов отопления, панелей в кухнях и санузлах, а также во всех других случаях при небольших объемах работ; для художественных работ) различаются между собой размерами и формой отпечатка факела. Конструктивно их выполняют по сходным схемам (рис. 25.9). Краска поступает к головке 2 распылителя по каналу 1 в передней части корпуса 3, а воздух — по каналу 6 в рукоятке. Подачу краски регулируют винтом 5, соединенным с иглой 4, а подачу воздуха — устройством 8, приводимым в движение курком 7. При нажатии на курок сначала к головке подается воздух и только после этого игла открывает канал для прохода краски. При отпускании курка сначала прекращается подача краски и только потом воздуха. Этим обеспечивается предварительный обдув воздухом окрашиваемой поверхности, исключается выброс крупных капель краски на нее при отпускании курка.
приборов отопления, панелей в кухнях и санузлах, а также во всех других случаях при небольших объемах работ; для художественных работ) различаются между собой размерами и формой отпечатка факела. Конструктивно их выполняют по сходным схемам (рис. 25.9). Краска поступает к головке 2 распылителя по каналу 1 в передней части корпуса 3, а воздух — по каналу 6 в рукоятке. Подачу краски регулируют винтом 5, соединенным с иглой 4, а подачу воздуха — устройством 8, приводимым в движение курком 7. При нажатии на курок сначала к головке подается воздух и только после этого игла открывает канал для прохода краски. При отпускании курка сначала прекращается подача краски и только потом воздуха. Этим обеспечивается предварительный обдув воздухом окрашиваемой поверхности, исключается выброс крупных капель краски на нее при отпускании курка.
Пневматические краскораспылители обеспечивают высокое качество окрашивания, надежны и просты в работе и обслуживании. Их существенным недостатком являются значительные потери (до 30%) краски на так называемое туманообразование. Эта краска, не достигая окрашиваемой поверхности, уносится сжатым воздухом, резко ухудшая условия работы в закрытых помещениях. Некоторое улучшение условий работы достигается за счет применения пневматических краскораспылителей низкого давления.
В настоящее время наиболее эффективно применение в строительстве безвоздушного способа окрашивания, при котором потери краски могут быть снижены до 2 %, а оператор может работать без применения каких-либо защитных средств.
Окрасочный агрегат(рис. 25.10, а) состоит из насоса / высокого давления (до 30 МПа) мембранного или поршневого типа, краскораспылителя 2 и соединяющего их материального шланга 3. На рис. (рис. 25.10, б) представлена кинематическая схема агрегата с насосом мембранного типа. Насос приводится в движение электродвигателем 7 через упругую муфту 6. При вращении маховика 9 с наклонной рабочей поверхностью плунжер 11 совершает
Рис. 25.10. Окрасочный агрегат безвоздушного распиливания: а — общий вид; б — кинематическая схема
возвратно-поступательное движение, сообщая колебательное движение мембране 12 через буферную жидкость, которая поступает в буферную зону из корпуса 8 через сетчатый фильтр 10. Соответственно колебаниям мембраны происходит всасывание краски из расходной емкости через фильтр 15 и клапан 13 и ее нагнетание через клапан 4 по материальному шлангу 3 к краскораспьшителю 2. Давление нагнетания регулируют устройством 5, перепускающим часть рабочей жидкости из буферной зоны в корпус 8. При перекрытом канале краскораспылителя и работающем насосе красочный состав возвращается в расходную емкость по трубопроводу 16 через перепускной клапан 14. Один насос может обслуживать несколько краскораспылителей. Особенно эффективно применять окрасочные агрегаты безвоздушного распыления при больших объемах работ с Рис. 25.11. Форсунка краскопульта
расходом краски до 7 л/мин и дальности подачи по вертикали до 100 м. В этом случае их производительность превышает 600 м2/ч.
Для работы с водно-меловыми и водно-известковыми составами небольшой вязкости применяют краскопульты — ручные или приводные насосы, от которых по материальному шлангу состав поступает к краскораспылителю {форсунке) (рис. 25.11) под давлением 0,4 МПа, касательно к ее внутренней полости, вследствие чего закручивается и вылетает из форсунки, образуя факел в виде полого конуса.
25.3. Машины и оборудование для отделки полов
Бетонные полы затирают сразу же после вакуумной обработки. Для грубого заглаживания поверхностей бетонных и мозаичных полов применяют трех- и четырехлопастные машины со сменными лопастями различной ширины. Широкие лопасти используют для затирки, а узкие — для железнения поверхности бетона.
Для более качественной отделки полов применяют дисковые затирочные машины(рис. 25.12) с двумя вращающимися навстречу друг другу рабочими дисками 4 и 7из древесно-стружечных плит. Для самоустановки дисков в плоскости вращения они соединены с валами J и 8 редуктора 2 резиновыми мембранами 5 и 6. Рабочие диски приводятся в движение от асинхронного электродвигателя 3 через редуктор. Пульт управления с пакетным выключателем и краном для подачи воды в зону обработки установлены на рукоятке, закрепленной на корпусе машины.
Для шлифования и полирования полов из мозаики, мрамора, гранита и т. п. материалов применяют мозаично-шлифовальные машины(рис. 25.13). Они приводятся в движение электродвигателем 1 или, реже, — двигателем внутреннего сгорания через зубчатый редуктор 2. Принципиальные схемы устройства и работы этих машин сходны с таковыми для дисковых затирочных машин и отличаются от последних рабочим инструментом, в качестве которого приме-
Рис. 25.12. Кинематическая схема дисковой затирочной машины
Рис. 25.13. Мозаично-шлифовальная машина
 няют трехгранные абразивные камни 4, закрепленные в державках 3 на планшайбах 5. Частота вращения рабочих органов составляет 250…750 об/ мин. Меньшие скорости используют при грубой обдирке поверхностей, а большие при тонком шлифовании и полировании. Для улучшения процесса шлифования в рабочую зону подают воду.
няют трехгранные абразивные камни 4, закрепленные в державках 3 на планшайбах 5. Частота вращения рабочих органов составляет 250…750 об/ мин. Меньшие скорости используют при грубой обдирке поверхностей, а большие при тонком шлифовании и полировании. Для улучшения процесса шлифования в рабочую зону подают воду.
| Рис. 25.14. Машина для строгания деревянных полов |
Для строжки деревянных полов применяют строгальные машины(рис. 25.14). Их рабочим органом является вращающийся барабан 10, на периферийной поверхности которого установлены ножи 9. Барабан приводится во вращение либо обращенным электродвигателем с неподвижным ротором и вращающимся статором, выполненным заодно с барабаном, либо вынесенным на корпус машины электродвигателем через ременную передачу. Копирная плоскость отслеживается одним передним 1 и двумя задними 8 роликами. Последние свободно установлены на оси 7 траверсы 6, положение которой регулируют рукояткой 3 через подпружиненную тягу 5, чем достигается требуемая глубина строгания. Стружка выносится из зоны строгания воздушным потоком, создаваемым крыльчаткой вентилятора, установленного на валу ножевого барабана. Запускают и останавливают электродвигатель магнитным пускателем 2, установленным на стойке 4. Строжку выполняют в два прохода: продольным при глубине строгания 2… 2,5 мм и поперечным (чистовым) — 0,5… 1 мм. Производительность машины составляет до 40 м2/ч.
Для шлифования дощатых и паркетных полов применяют шлифовальные машины барабанного и дискового типов.
| Рис. 25.15. Машина барабанного типа для шлифования дощатых и паркетных полов |
Шлифовальная машина барабанного типа(рис. 25.15) по устройству и принципу
работы сходна с рассмотренной выше строгальной машиной с вынесенным на корпус машины приводным электродвигателем. Отличия заключаются в следующем. Копирная поверхность отслеживается двумя передними 3, регулируемыми по высоте, и одним задним 4 рояльного типа роликами. Рабочим инструментом служит шлифовальная шкурка, закрепляемая на шлифовальном барабане 2 по слою резины. Барабан установлен перед передними роликами, высотным положением которых регулируют глубину шлифования. Продукты шлифования выносятся потоком воздуха, создаваемым крыльчаткой вентилятора, приводимого общим электродвигателем /, и оседают в сборном мешке 5. Шлифуют полы в два приема — продольной и поперечной проходкой. Производительность машины достигает 60 м2/ч обработанной поверхности.
Шлифовальные машины дискового типаприменяют для шлифования полов в стесненных условиях (под приборами отопления, в углах помещений). Их рабочим органом служит вращающийся диск с закрепленной на нем абразивной шкуркой. Рабочая поверхность диска наклонена к обрабатываемой поверхности под углом 10… 15°. Производительность диско-шлифовальных машин достигает 5 м2/ч.
При устройстве полов из рулонных материалов раскраивают и сваривают полотнища в централизованных подсобных предприятиях, а их прикатку, прирезку и подварку отдельных мест выполняют непосредственно на строительном объекте. Линолеум сваривают посредством инфракрасного излучения, токами высокой частоты и горячим воздухом с нагревом кромок и сварочного шнура до температуры 220…270 «С. Размягченный сварочный шнур вплавляют в стык свариваемых полотнищ, вдавливая его прижимным роликом.
Для сварки отдельных мест на объекте применяют переносную сварочную установку.Она состоит из воздуходувки или переносного диафрагменного компрессора и сварочной головки со спиралью для нагрева воздуха и прижимным роликом. Сваривают ли-нолеумные стыки описанным выше способом. Скорость сварки составляет 8… 10 м/ч.
§
Удельный вес кровельных работ в общем комплексе городского строительства составляет по трудоемкости около 14%. Основными видами кровельных покрытий в настоящее время являются рулонные и безрулонные (мастичные) кровли.
Технологический цикл устройства рулонной кровли включает подготовку основания, очистку рулонных материалов от минеральной посыпки, подъем доставленной на объект мастики на крышу, наклейку рулонных материалов и их прикатку.
Подготовка основания заключается в удалении с него пыли, воды, наледи и снега, а также сушке основания. Пыль удаляют пылесосами и передвижными компрессорами, а воду передвижными вакуум-насосами и переносными насосами. Для сушки основания, а также для таяния наледи и снега используют передвижные огневые установки с керосиновыми горелками и трубами для направления потока горячих газов; передвижные воздухоподогреватели для сушки больших площадей с одной или двумя горелками, центробежным вентилятором и диффузором для смешивания горячей газовой смеси с холодным воздухом; воздуходувки с электрическими нагревательными элементами; передвижные установки с вентилятором для сушки оснований совместным действием инфракрасного излучения раскаленного поддона, горячих газов и конвекционного обмена.
Очищают рулонные материалы от минеральной посыпки перед укладкой и наклейкой на основание протяжкой полотнища между валками, смачивающими его растворителем, и механической очисткой полотнищ одной или двумя вращающимися круглыми капроновыми щетками.
Для перекачивания битумных мастик с пылевидными, волокнистыми и комбинированными наполнителями и приклейки на кровле рулонных материалов применяют смонтированные на прицепе агрегаты, состоящие из термоса с электронагревателем, смесителя и насосной станции с мастикопроводами. Температурный режим контролируется и поддерживается автоматически. Агрегат обеспечивает подачу 6 м3/ч мастики на кровлю на высоту до 50 м при давлении 1,5 МПа.
Для выполнения массовых кровельных работ битум доставляют на объект автогудронаторами,оборудованными горелками для подогрева мастики и насосом для наполнения цистерны, перемешивания и выдачи мастики. Горячую мастику из гудронатора подают на крышу, где ее направляют на поверхности наклейки рулонных материалов, или сливают в котлы-термосы, из которых ее перекачивают шестеренными насосами по трубопроводу к месту производства работ.
Битумоварочные котлы(рис. 25.16) применяют для приготовления битумных мастик непосредственно на объекте и подачи ее к месту производства работ. Оборудование, состоящее из бака 7 с крышкой 4, жаровой системы 2, системы подачи 6 и шестеренного насоса / с приводом от электродвигателя монтируют на одноосном прицепе 3. Битумоварочные котлы являются объектами повышенной пожароопасности, в связи с чем их комплектуют противопожарными средствами, а при работе неукоснительно соблюдают требования пожарной безопасности, общие и предписанные инструкцией по эксплуатации оборудования. Загруженный в бак битум (не более 3/4 объема бака) расплавляют передачей теп-
CZD

Рис. 25.16. Битумоварочный котел
ла через стенки жаровой системы, топочная камера которой работает на дизельном топливе. Во избежание обильного пенообра-зования при варке битума наполнитель должен быть сухим. Мастику подают на крышу по мастикопроводу 5 на высоту до 50 м при давлении 1,5 МПа. Производительность битумных котлов составляет около 5 м3/ч.
При устройстве кровель из рубероида с наплавленным в заводских условиях слоем мастики после раскатки рулонов на крыше их разогревают горелками до температуры 140… 160° и прикатывают специальными устройствами на обрезиненных колесах.
Для устройства безрулонных кровель из мастичных материалов на полимерной основе используют передвижные станциис помощью которых мастичные материалы разгружают, разжижают, подают к месту производства работ и наносят на поверхность распы-ливанием. Производительность станции составляет до 800 м2/ч, дальность подачи по вертикали до 50 м, по горизонтали до 80 м.
Контрольные вопросы
1.Перечислите виды механизированных работ при оштукатуривании
поверхностей. Как организовано приготовление штукатурных растворов
при больших и небольших объемах работ? Перечислите оборудование
штукатурного комплекта.
2. Для чего предназначены, как устроены и как работают штукатур
ные станции? Какие типы растворонасосов используют в составе штука
турных станций? Чем отличаются противоточные насосы от прямото
чных?
4ЧХ
3. Опишите принцип работы одноцилиндрового противоточного пор
шневого растворонасоса. Чем отличается от него двухцилиндровый диф
ференциальный растворонасос? Как определяют производительность
поршневых противоточных растворонасосов?
4. Для чего предназначены, как устроены и как работают пневмона-
гнетатели?
5. Для чего предназначены, как устроены и как работают передвиж
ные агрегаты цикличных смесителей принудительного перемешивания?
Какими насосами их комплектуют? Каковы их выходные параметры?
6. Для чего применяют, как устроены и как работают винтовые ра-
створонасосы?
7. Для чего применяют, как устроены и как работают поэтажные шту
катурные агрегаты?
8. Для чего применяют, как устроены и как работают воздушные и
безвоздушные форсунки?
9. Для чего применяют ручные затирочные машины? Какой вид при
вода они используют?
10. Для чего применяют торкретные установки? Перечислите состав
входящего в них оборудования. Охарактеризуйте принцип действия тор
кретной установки. Каковы ее выходные параметры?
11. Перечислите состав малярных работ. Какими способами и с исполь
зованием каких технических средств подготавливают поверхности к окрас
ке? Как организовано приготовление малярных составов? Какое оборудо
вание используют для этого? Для чего применяют малярные агрегаты? Ка
ким оборудованием их комплектуют? Каковы их выходные параметры?
12. Для чего применяют, как устроены и как работают шпатлевочные
установки? Каковы их выходные параметры?
13. Для чего применяют передвижные шпатлевочные агрегаты? Како
вы их выходные параметры?
14. Для чего применяют окрасочные агрегаты? Перечислите их виды.
Каковы выходные параметры передвижных и переносных окрасочных
агрегатов?
15. Для чего применяют пневматические краскораспылители, каковы
их типы, как они устроены и как работают? Каковы их достоинства и
недостатки?
16. Как устроены и как работают безвоздушные распылители? Каковы
их выходные параметры? Приведите сравнительную оценку с пневмати
ческими распылителями.
17. Для чего применяют краскопульты? Каков принцип работы их
краскораспылителей?
18. Для чего применяют, как устроены и как работают дисковые зати
рочные машины, мозаично-шлифовальные машины?
19. Какие машины применяют для строжки полов? Как они устроены
и как работают? Каковы их выходные параметры?
20. Какие машины применяют для шлифования и полирования доща
тых и паркетных полов? Как они устроены и как работают? Каковы их
выходные параметры? Для чего применяют шлифовальные машины дис
кового типа, каковы их выходные параметры?
21. Каким способом сваривают полотнища линолеума? Какое обору
дование применяют для сварки отдельных мест?
22. Перечислите виды работ при устройстве кровель из рулонных ма
териалов. Какими способами и с использованием каких технических
средств подготавливают основание для наклейки рулонных материалов?
Как очищают рулонные материалы от минеральной посыпки?
23. Какое оборудование используют для перекачивания битумных ма
стик и подачи их к местам производства кровельных работ? Каковы вы
ходные параметры этого оборудования? Для чего применяют автогудро
наторы?
24. Для чего применяют, как устроены и как работают битумовароч-
ные котлы? Какие меры противопожарной безопасности применяют при
их эксплуатации?
25. Каким способом и с использованием каких технических средств
устраивают кровли из рубероида с наплавленной в заводских условиях
мастикой?
26. Какое оборудование используют для устройства безрулонных кро
вель? Каковы его выходные параметры?
Глава 26. РУЧНЫЕ МАШИНЫ
Общие сведения
Ручными называют машины, рабочий орган которых приводится в движение двигателем, а вспомогательное движение (подача) — оператором вручную. Ручные машины применяют в строительстве для выполнения самых разнообразных работ. Ради комплексного описания механизации отдельных видов работ некоторые из этих машин были рассмотрены ранее (гл. 19, 24, 25). В целом же ручные машины принято классифицировать следующим признакам:
по принципу действияразличают машины непрерывно-силовые и импульсно-силовые. К первым относятся машины с непрерывно вращающимся рабочим органом (сверлильные, шлифовальные машины, дисковые пилы и т.п.). Возникающий при работе этих машин реактивный момент воспринимается оператором, что является их существенным недостатком и накладывает определенные ограничения на мощность их приводов. Ко вторым относятся машины, работающие в прерывисто-импульсном режиме — ударном (молотки, перфораторы, вырубные ножницы) и безударном (ножевые ножницы). Машины ударного действия могут работать в чисто ударном (молотки, бетоноломы, трамбовки), ударно-поворотном (перфораторы) или ударно-вращательном (гайковерты) режимах;
по характеру движения рабочего органаразличают ручные машины с вращательньш, возвратным и сложным движением. К первой группе относятся машины как с круговым вращательным движением (дисковые пилы, сверлильные машины, бороздоделы и т.п.), так и машины с движением рабочего органа по замкнутому контуру (цепные и ленточные пилы, долбежники, ленточные шлифовальные машины и т. п.). Возвратное движение рабочего органа реализуется в машинах с возвратно-поступательным (ножницы, напильники, лобзики и т.п.), и колебательным (вибровозбудители) движениями рабочего органа, а также в машинах ударного действия (трамбовки, молотки, пневмопробойники и т.п.). К ручным машинам со сложным движением относятся машины ударно-поворотного и ударно-вращательного действия и машины с иными видами движений рабочего органа, не соответствующими приведенным выше характеристикам;
по режиму работыручные машины делят на машины легкого, среднего, тяжелого и сверхтяжелого режимов. В легком режиме работают сверлильные машины, в сверхтяжелом — все типы машин ударного действия. Ручные машины могут быть реверсивными и нереверсивными, одно- и многоскоростными, с дискретным и бесступенчатым регулированием рабочих скоростей;
по назначению и области примененияручные машины подразделяют на машины общего назначения для обработки различных материалов, машины для обработки металлов, дерева, пластмасс, камня и бетона, машины для работы по грунту и машины для сборочных работ. Особую группу составляют универсальные машины с комплектом насадок для выполнения определенных видов работ;
по виду приводаручные машины могут быть электрическими, пневматическими, гидравлическими, с приводом от двигателей внутреннего сгорания, а также пиротехнические. Электрическим ручным машинам присваивают три класса защиты от поражения электрическим током. Машины с номинальным напряжением более 42 В имеют I и II класс защиты. У них доступные для прикосновения металлические детали отделены от частей, находящихся под напряжением, только рабочей (машины I класса) или двойной, усиленной (машины II класса), изоляцией. Ручные машины с номинальным напряжением до 42 В, питающиеся от автономных источников электроэнергии, либо от преобразователей или трансформаторов с раздельными обмотками имеют III класс защиты;
по конструктивному исполнениюручные машины с вращающимся рабочим органом делят на прямые и угловые, соответственно при совпадающих (параллельных) осях вращения рабочего органа и привода или расположенных под углом друг к другу.
Основными параметрамиручных машин являются: потребляемая мощность, напряжение, род, сила и частота тока (для электрических машин); рабочее давление сжатого воздуха (для пневматических машин). Единой системы индексации ручных машин не существует. Индексы определяют разработчики машин и их изготовители. Наиболее широко используют индексы, состоящие из буквенной и цифровой частей. Первой буквой «И» обозначают все ручные машины («механизированный инструмент»), вторая буква обозначает вид привода: Э — электрический, Г — гидравлический, П — пневматический, Д — от двигателя внутреннего сгорания. Первая цифра цифровой части индекса обозначает группу машин: 1 — сверлильные, 2 — шлифовальные, 3 — резьбозавер-тывающие, 4 — ударные, 5 — фрезерные, 6 — специальные и универсальные, 7 — многошпиндельные, 8 — насадки и головки инструментальные, 9 — вспомогательное оборудование, 10 — резервная группа. Вторая цифра обозначает исполнение машины: 0 —
прямая, 1 — угловая, 2 — многоскоростная, 3 — реверсивная. Последними двумя цифрами обозначают номер модели. Буквы после цифр обозначают очередную модернизацию. Например, индекс ИЭ-1202А расшифровывается как ручная электросверлильная многоскоростная машина второй модели, прошедшая первую модернизацию.
Чаще всего ручные машины используют в строительстве в условиях ограниченного пространства и времени, в связи с чем к этим машинам предъявляются требования компактности и комплектности, обеспечивающие удобство перемещения и быстроту запуска машины в работу. Конструкция машины должна исключать возможность получения оператором травм, поражения электрическим током, шумо- и виброболезни, а ее внешний вид должен отвечать требованиям эстетики. Соответственно первому требованию при разработке и изготовлении ручных машин стремятся максимально снизить их массу и габаритные размеры. Желательно, чтобы эти машины работали с минимальными потерями энергии. Однако в ряде случаев это требование не является обязательным. Так, пневматические ручные машины имеют значительно меньший КПД по сравнению с электрическими, но они легче и безопаснее. Коллекторный двигатель имеет меньший КПД, чем асинхронный, но из-за меньшей массы машин с коллекторными двигателями их применяют чаще. Форма и расположение рукояток, выключателей, а также уравновешенность и внешний вид современных ручных машин обеспечивают максимальное удобство в работе и отвечают современным требованиям технической эстетики. В конструкциях ручных машин широко использован принцип поузловой унификации, обеспечивающий снижение трудоемкости и стоимости их изготовления и ремонта.
§
К ручным машинам для образования отверстий относятся ручные сверлильные машины и перфораторы.
Ручные сверлильные машиныпо объему выпуска занимают первое место среди ручных машин. Они предназначены для сверления глухих и сквозных отверстий в металле, дереве, пластмассе, бетоне, камне, кирпиче и других материалах. Эти машины являются базовыми для создания универсальных ручных машин.
Ручные сверлильные машины являются машинами с вращательным движением рабочего органа, работают в легком режиме, могут быть реверсивными и нереверсивными, одно- и многоскоростными с дискретным, бесступенчатым и смешанным регулированием частоты вращения рабочего органа. Они приводятся в движение электрическими, пневматическими или гидравлическими двигателями. По защите от поражения током электрические машины выпуска-
ют всех трех классов. По конструктивному исполнению эти машины бывают прямыми и угловыми. Последние применяют для работы в труднодоступных местах.
Основными сборочными единицами ручной сверлильной машины являются заключенные в корпус двигатель, редуктор, рабочий орган — шпиндель и пусковое устройство. На рис. 26.1 показана электрическая ручная сверлильная машина. Статор 4 и ротор 5 электродвигателя встроены в корпус 2. Движение шпинделю / передается через двухступенчатый зубчатый редуктор 3. Электродвигатель, охлаждаемый крыльчаткой 8 вентилятора, посаженной на вал ротора, питается от внешней электросети, с которой он соединен кабелем 7. Его запускают выключателем 6. Чаще выключатель находится во включенном положении, будучи прижатым пальцем руки оператора. При отпускании пальца он размыкает электрическую цепь. При необходимости длительное время удерживать выключатель во включенном положении его фиксируют специальной кнопкой.
В пневматической сверлильной машине источником движения является встроенный в ее корпус пневмодвигатель, питаемый сжатым воздухом от внешнего источника и запускаемый выключателем, открывающим клапан для прохода сжатого воздуха к двигателю.
Рабочим инструментомсверлильных машин (рис. 26.2) служат сверла. Для работы по металлу применяют спиральные сверла с цилиндрическим (диаметром до 6 мм) 1 и коническим (диаметром
| 31 | d | |||||
| а | а | X | ||||
| П | ||||||
| П | а а | D | О | |||
| б | ||||||
| а | LJ | _ | □ |
Рис. 26.1. Электрическая ручная сверлильная машина (а) и кинематическая
схема ее привода (б)

Рис. 26.2. Сверла для работы по металлу (/, 2) и дереву (3—9)
более 6 мм) 2 хвостовиком. Сверла диаметром до 14 мм обычно закрепляют в трехкулачковом патроне, одеваемом на шпиндель, а сверла больших диаметров — непосредственно в шпинделе с внутренним конусом Морзе. Рабочая часть сверла состоит из режущей и направляющей частей со спиральными двухзаходными канавками. Режущая часть образуется в результате заточки сверла под углом ф (116… 118° для стали, чугуна, твердой бронзы; 130… 140° для очень твердых и хрупких материалов; 80…90 для мягких и вязких материалов) при вершине торцовой части.
При работе по дереву вдоль волокон применяют сверла ложечные 3 и с конической заточкой 4, при работе поперек волокон — центровые 5 и спиральные 6 с подрезателями, для сверления глубоких отверстий — винтовые 7 и шнековые 8, для сверления фанеры — штопорные 9 с круговыми подрезателями.
| Рис. 26.3. Сверла специального назначения |
Для сверления отверстий в кирпиче, керамзитобетоне, шлакобетоне и гипсолите применяют двухлезвийные резцы (рис. 26.3, а),

армированные твердосплавными вольфрамо-кобальтовыми пластинками ВК6 повышенной износоустойчивости, но не допускающими ударных нагрузок. Для сверления глухих отверстий под электрические розетки и выключатели применяют шлямбурные резцы (рис. 26.3, б). Средняя скорость сверления ими отверстий диаметром 70… 100 мм в кирпиче — до 200 мм/мин. Монолитный бетон сверлят алмазными кольцевыми сверлами (рис. 26.3, в), состоящими из коронки, оснащенной техническими алмазами, и трубчатого удлинителя.
Для сверления отверстий ручную машину устанавливают так, чтобы сверло находилось на месте сверления. Затем прижимают ее в направлении сверления и включают двигатель. Для начальной центровки сверла предварительно в материале делают углубление дюбелем или другим инструментом с твердым наконечником. С увеличением диаметра отверстия требуются большие усилия подачи, в связи с чем сверлильные машины с диаметром сверл более 14 мм изготавливают с грудным упором.
Сверлильные машины ударно-вращательного действияболее эффективны для работы с хрупкими материалами. В них при непрерывном вращении рабочего органа специальным механизмом наносятся удары по материалу в осевом направлении. Обычно такие машины имеют многоскоростной привод с дискретным или бесступенчатым регулированием рабочих скоростей. Наиболее распространены машины с четырьмя ступенями скоростей. Две ступени обеспечиваются двухступенчатым редуктором, а две другие — отключением части витков полюсных катушек, вследствие чего снижается магнитный поток двигателя и увеличивается частота вращения его якоря. Диапазон регулирования частоты вращения шпинделя в таких машинах составляет 0… 10000 об/мин.
На базе ручных сверлильных машин с регулируемой частотой вращения шпинделя выпускают универсальные ручные машины с комплектом насадок для выполнения различных работ: сверления и резки металлов, снятия фасок, развертывания отверстий, нарезания резьбы и сборки резьбовых соединений и т. п.
Потребляемая мощность двигателя (кВт) электросверлильной машины находится примерно в прямой пропорциональной зависимости от диаметра D (мм) отверстия (сверла): Р = 0,018 D.
Ручные перфораторыприменяют, в основном, для образования отверстий в различных материалах. Некоторые модели могут работать в режимах молотка и сверлильной машины. Перфораторы являются импульсно-силовыми машинами со сложным движением рабочего органа — бура, для чего в трансмиссии перфоратора имеются ударный и вращательный механизмы, иногда конструктивно совмещенные. Основными параметрами перфораторов являются энергия и частота ударов.
По назначению различают перфораторы для образования неглубоких отверстий (300… 500 мм) в материалах прочностью 40… 50 М Па и глубоких отверстий (2000…4000 мм и более) в материалах практически любой прочности (200 МПа и более).
По типу привода перфораторы подразделяют на машины с электрическим (электромеханическим и электромагнитным), пневматическим приводом и от двигателей внутреннего сгорания.
Электромеханические перфораторыс энергией удара до 10 Дж применяют для образования отверстий диаметром 5…80 мм глубиной 600…700 мм и более в бетоне, кирпичной кладке и других строительных материалах и конструкциях. При массе до 16 кг перфоратор может занимать любое положение относительно образуемого отверстия, а перфораторы большей массы работают только в направлении сверху вниз. Перфораторы с коллекторными электродвигателями с двойной изоляцией питаются от сети переменного тока номинальной частоты напряжением 220 В, а перфораторы с асинхронными короткозамкнутыми двигателями, снабженные защитноотключающими устройствами, — от трехфазной сети.
Перфораторы с энергией удара более 10 Дж массой 30…35 кг работают, как правило, от асинхронного электродвигателя. Их применяют для образования отверстий в крепких материалах диаметром 32… 60 мм при глубине до 6 м. Без специальных устройств они работают обычно в направлении сверху вниз. Отечественная промышленность выпускает электромеханические перфораторы с энергией удара 1… 25 Дж.
| Рис. 26.4. Принцип работы компрессионно-вакуумного ударного механизма |
 Ударные механизмы перфораторов могут быть пружинными, воздушными (компрессионно-вакуумными) и комбинированными. Наиболее распространены компрессионно-вакуумные механизмы, принцип работы которых показан рис. 26.4. При вращении кривошипа 6 соединенный с ним шатуном 5 поршень 3 совершает возвратно-поступательное движение в направляющей гильзе 4. При движении поршня вправо в камере между поршнем и бойком 2 создается разрежение, вследствие чего боек перемещается вслед за поршнем (см. рис. 26.4, а). При возвратном движении поршня за счет повышающегося в камере давления воздуха поршень перемеща-
Ударные механизмы перфораторов могут быть пружинными, воздушными (компрессионно-вакуумными) и комбинированными. Наиболее распространены компрессионно-вакуумные механизмы, принцип работы которых показан рис. 26.4. При вращении кривошипа 6 соединенный с ним шатуном 5 поршень 3 совершает возвратно-поступательное движение в направляющей гильзе 4. При движении поршня вправо в камере между поршнем и бойком 2 создается разрежение, вследствие чего боек перемещается вслед за поршнем (см. рис. 26.4, а). При возвратном движении поршня за счет повышающегося в камере давления воздуха поршень перемеща-

б
Рис. 26.5. Схема переключения перфоратора из ударного (а) режима в безударный (б)
| Рис. 26.6. Кинематическая схема электромеханического перфоратора |
ется влево (см. рис. 26.4, б) и в конце этого движения наносит удар по буру 1 (см. рис. 26.4, в). Перфоратор работает в ударном режиме только после нажатия на его корпус в направлении обрабатываемого отверстия, когда хвостовик бура 4 (рис. 26.5), переместившись в держателе 5 вверх, ограничивает нижнее перемещение бойка 2, перекрывающего окно 3 в поршне. После прекращения нажатия на корпус бур вместе с бойком опускается в держателе вниз. При возвратно-поступательном движении поршня / камера между ним и бойком сообщается через окно 3 с атмосферой, и разрежения в нем не происходит, а следовательно, боек остается в нижнем неподвижном положении.
Механизмы вращения бура могут быть кинематическими и динамическими. В кинематическом механизме вращение буру 5 (рис. 26.6) передается от электродвигателя 1 через систему зубчатых передач 2 и 4. Для ограничения крутящего момента, во избежание получения оператором травм при заклинивании бура, в трансмиссию вводят предохранительную шариковую или дисковую муфту 3.
На рис. 26.7 приведена принципиальная схема динамического поворотного механизма с импульсным поворотом вставленного в
буксу 6 бура 7 на некоторый угол во время холостого хода бойка 5. Последний соединен подвижным шлицевым соединением с поворотной буксой 6, свободно посаженной в корпус перфоратора /, и винтовым соединением со стержнем 4, на конце которого закреплено храповое колесо 2 с собачкой 3. При движении вверх боек вместе с буксой проворачивается на застопоренном храповым механизмом винтовом стержне 4, при движении вниз срабатывает храповой механизм, позволяя провернуться винтовому стержню вместе с храповым колесом.
| Рис. 26.7. Динамический поворотный механизм перфоратора |
В электромагнитных перфораторах,называемых также фугальными, вращение бура / (рис. 26.8) с буксой 2 передается от электродвигателя 6 через редуктор 7 с муфтой предельного момента 3, срабатывающей при заклинивании бура. Возвратно-поступательное движение бойка 4 с ударами по хвостовику рабочего органа осуществляется переменным магнитным полем от катушек 5.
Пневматические перфораторыотличаются от электромеханических типом двигателя — пневмодвигателем, работающим от компрессора. В частности, в перфораторах с динамическим поворотным механизмом основное движение — возвратно-поступательное перемещение бойка-поршня — обеспечивается попере-

Рис. 26.8. Принципиальная схема устройства фугального перфоратора
менной подачей сжатого воздуха в поршневую и штоковую полости. Импульсное вращение рабочему органу передается, как и у электромеханического перфоратора, через винтовую пару и храповой механизм (см. рис. 26.7).
§
Для монтажа металлоконструкций, выполнения электромонтажных, сантехнических и других видов работ применяют резьбовые соединения, используя для этого стандартные детали (болты, винты, гайки, шпильки, шурупы, гвозди, скобы, дюбели) или изготавливая отдельные их элементы по месту. Для механизации этих работ применяют ручные машины.
Резьбозавертывающие машиныприменяют для сборки резьбовых соединений. К ним относятся гайко-, шурупо-, шпильковер-ты с непрерывно-силовым или импульсно-силовым вращательным движением рабочего органа. Эти машины отличаются от сверлильных машин рабочим инструментом — торцовыми ключами для работы с болтами, винтами и гайками или отвертками для работы со шпильками и шурупами — и наличием в трансмиссии муфты предельного момента, при достижении которого муфта отключает рабочий орган от двигателя. Рабочий инструмент соединяют с рабочим органом жестко или шарнирно, в последнем случае для работы в труднодоступных местах. Резьбозавертывающие машины реверсивны, их применяют как для сборки, так и для разборки резьбовых соединений.
Машины с непрерывно-силовым движением рабочего органапросты по устройству. Их основным недостатком является значительный реактивный момент, воспринимаемый оператором, особенно в конце затяжки резьбового соединения. Машины этого типа работают с резьбовыми соединениями диаметром до 16 мм. Машины импульсно-силового типа лишены этого недостатка. Это — частоударные машины, обеспечивающие затяжку резьбовых соединений за 100…200 ударов в течение 4…5 с, и редкоударные (3…15 ударов на одно резьбовое соединение). По сравнению с непрерывно-силовыми импульсно-силовые ручные машины обеспечивают больший момент затяжки резьбовых соединений при равных параметрах их двигателей.
В качестве примера частоударной импульсно-силовой ручной машины рассмотрим электрический гайковерт(рис. 26.9). Вращение шпинделю / с закрепленным на нем ключом 9 передается от электродвигателя, вмонтированного в корпус 4, через редуктор 3 и ударно-импульсный механизм в виде винтовой пары выходной вал редуктора 5 — втулка 2, соединенных между собой винтовыми пазами на валу и входящими в них и в лунки на внутренней поверх-
| Рис. 26.9. Электрогайковерт |
ности втулки шариками 7. Шпиндель может свободно перемещаться в осевом направлении в корпусе и в нерабочем состоянии, отжимаемый пружиной 8, занимает в нем крайнее левое положение. Для начала работы ключ надевают на навинчиваемую гайку или головку болта (винта) и прижимают корпус в осевом направлении. Преодолевая сопротивление пружины 8, шпиндель перемещается относительно корпуса вправо, зацепляется своими кулачками на его торцовой поверхности с кулачками втулки 2 и приходит во вращательное движение. С увеличением сопротивления вращению шпинделя его скорость замедляется, и втулка 2, преодолевая сопротивление пружины 6 и навинчиваясь на вал 5, отходит от шпинделя вправо, выводя кулачки из зацепления со шпинделем. Втулка, освобожденная от этого зацепления, получает ускоренное вращение от вала 5 и под действием пружины 6 перемещается влево, ударом входя в зацепление с кулачками шпинделя. Эти движения продолжаются до тех пор, пока шпиндель не займет свое левое нерабочее положение. Основными параметрами частоударных гайковертов являются максимальный момент затяжки и время затяжки резьбового соединения. Процесс сборки резьбового соединения такими гайковертами осуществляется за 100…200 ударов в течение 4…5 с. Для работы в режиме развинчивания резьбовых соединений переключают фазы электропитания при помощи штепсельного соединения.
Момент затяжки ограничивают муфтами предельного момента или временем действия ударного механизма. Эти меры не обеспечивают необходимой точности параметров затяжки резьбовых соединений, в связи с чем частоударные гайковерты применяют только для сборки неответственных соединений.
Редкоударные гайковертыобладают большей точностью. Основным их параметром является энергия удара, составляющая около 25 Дж. По сравнению с частоударными машинами они имеют меньшую массу (на 20…40%) и более высокий КПД. Их применяют для сборки резьбовых соединений диаметром 22…52 мм при тарированном моменте затяжки 400… 5000 Нм. Продолжительность сборки одного соединения составляет 3…8 с.
В пневматическом редкоударном гайковерте(рис. 26.10) ведущая часть 4 ударного механизма приводится во вращение от пневматического ротационного двигателя 5. Ведомая часть (ударник) 3 посажена свободно на валик 7 и может перемещаться по нему в осевом направлении. В нерабочем состоянии ударник, отжимаемый пружиной 2, занимает крайнее правое положение. При включенном двигателе контактирующие с ведомой частью шарики (центробежные грузы) 6 приходят во вращение и за счет возникающих при этом центробежных сил перемещаются центробежно в радиальном направлении, отжимая ударник, который кулачками на его торцовой поверхности ударом входит в зацепление с кулачками шпинделя /. В начале процесса, когда сопротивление вращению шпинделя невелико, деталь резьбового соединения завинчивается без отключения шпинделя от ударника. В конце затяжки, с возрастанием сопротивления вращению, скорость шпинделя и ударника уменьшается, вследствие чего снижаются также окружная скорость центробежных грузов и действующие на них центробежные силы, и грузы
| Рис. 26.10. Редкоударный гайковерт |
перемещаются центростремительно. При этом пружина 2 перемещает ударник вправо, выводя его кулачки из зацепления с кулачками шпинделя. Освободившись от внешней нагрузки, ударник приходит в ускоренное вращение, и процесс ударного включения и отключения кулачкового соединения повторяется.
Для сборки резьбовых соединений диаметром 100…200 мм, например, при монтаже крупного технологического оборудования, применяют гайковерты с гидравлическим приводом, питаемые централизованно от насосной станции.
Шуруповерты (винтоверты)применяют при сборочно-разбороч-ных работах, например, при монтаже перегородок из сухой гипсовой штукатурки по металлическому, деревянному и асбоцементному каркасу. В качестве привода используют электрические реверсивные коллекторные двигатели с двойной изоляцией мощностью до 420 Вт с зубчатым редуктором и кулачковой муфтой предельного момента с регулятором значения последнего. Чаще в систему привода включают блок электронного регулирования частоты вращения в диапазоне от нуля до 0,75 ее номинального значения с ограничением максимальной частоты вращения. Для удобства работы в труднодоступных местах используют удлинители, переходные втулки, сменные патроны для крепления инструмента.
В качестве сменного инструмента используют отвертки под плоский и крестовый шлиц шурупов, а также головку-ключ. В ряде моделей шуруповертов зарубежного производства крепеж подается автоматически из сменных кассет, содержащих от 100 до 150 крепежных изделий.
 Резьбонарезные машиныс электрическим и пневматическим ро
Резьбонарезные машиныс электрическим и пневматическим ро
тационным двигателями применяют для нарезания резьбы в сквоз
ных и глухих отверстиях. Эти машины отличаются от сверлильных
инструментом, в качестве которого применяют метчики, и ревер
сивным устройством в трансмиссии, передающей движение от элек
тродвигателя рабочему органу. Трансмиссия электрической резьбо
нарезной машины (рис. 26.11) состоит из двух планетарных передач
11—10—9—8 (при неподвижном венцовом колесе 9) и 4—5—2.
Шпиндель /, свободно перемещаемый вдоль оси центрального ко
леса, на внешнем конце имеет пат
рон для крепления метчика с хво
стовиком квадратного сечения, а
на внутреннем конце — жестко со
единенную с ним двухстороннюю
кулачковую полумуфту 6. При на
жатии на корпус машины в направ
лении подачи полумуфта /3, жест
ко соединенная с венцовым зубча
тым колесом 8, входит в зацепле- рис. 26.11. Кинематическая схема
ние с полумуфтой 6, вследствие резьбонарезной машины
чего шпинделю передается от электродвигателя 12 правое вращение (на завинчивание метчика). Для возвратного вращения метчика (на его вывинчивание из резьбового отверстия) в случае нарезания резьбы в сквозных отверстиях корпус машины подают на себя. При этом полумуфта 6, удерживаемая в осевом направлении упирающимся в торцовую поверхность отверстия метчиком, выходит из зацепления с полумуфтой 13 и, при дальнейшей подаче корпуса на себя входит в зацепление с полумуфтой, выполненной заодно с центральным зубчатым колесом передачи второй ступени. В результате этих действий шпинделю сообщается левое вращательное движение с более высокой скоростью, и метчик вывинчивается из нарезанной им резьбы. В случае нарезания резьбы в глухих отверстиях ее глубину регулируют упором 3, закрепляя его на корпусе машины винтом 7. При достижении установленной глубины упор приходит в соприкосновение с телом нарезаемой детали, препятствуя дальнейшему перемещению корпуса в осевом направлении, а вращающийся шпиндель с ввинчивающимся в отверстие метчиком перемещается на отверстие, выводя полумуфту 6 из зацепления с полумуфтой 13. Для вращения метчика в обратном направлении поступают так же, как и в случае нарезания сквозных отверстий.
В отличие от нарезания резьбы вручную (направляющим, режущим и калибрующим инструментами) в ручных машинах используют метчики для нарезания резьбы в один проход.
Монтажные сборочные молоткиили пистолетыприменяют для забивки крепежных изделий (гвоздей, скоб, дюбелей). Крепежное изделие вставляют в ствол пистолета и одноразовым воздействием на него поршня-ударника забивают его в деревянное, металлическое, кирпичное или бетонное основание. В зависимости от вида привода различают пороховые, пневматические и электромагнитные молотки.
Пороховые молотки (рис. 26.12) предназначены для забивки дюбелей различного исполнения (дюбель-гвоздь, дюбель-винт —
| 9 8 Рис. 26.12. Пороховой строительно-монтажный пистолет |
6 7
с винтовой нарезкой хвостовика) в бетон до марки 400 включительно, сталь с пределом прочности до 450 МПа, кирпич. В работе порохового молотка используется принцип действия огнестрельного оружия. Дюбель 2 и пороховой патрон 6 закладывают в ствол 5. Далее молоток прижимают установленным на переднем конце прижимом / к основанию, предназначенному для забивки дюбеля, и нажимают на спускной рычаг 7. Под действием пружины 8 рычаг 9 ударяет острием наконечника в капсюль патрона, вследствие чего находящееся в нем воспламеняющееся от удара вещество поджигает порох. Образующиеся при этом пороховые газы, увеличиваясь в объеме, выталкивают из ствола поршень 3, который ударяет по хвостовику дюбеля, внедряя его в основание. После перемещения поршня в переднюю часть ствола полость последнего соединяется с камерой 4, через которую отработанные пороховые газы выбрасываются в атмосферу.
Тип патронов выбирают в зависимости от размеров забиваемых дюбелей и механических свойств оснований. Пороховые молотки комплектуют сменными стволами и поршневыми группами соответственно размерам дюбелей.
Пневматические молотки, называемые также гвозде- или ско-бозабивочными пистолетами, применяют для забивки гвоздей и скоб в деревянные, древесно-волокнистые, древесно-стружечные, цементно-стружечные и другие основания. Они бывают специальными — для забивки крепежных элементов определенного вида и универсальными — для забивки нескольких видов крепежных элементов.
В гвоздезабивном пневматическом пистолете (рис. 26.13) комплект гвоздей помещают в магазин 9, откуда они по одному поступают в ствол 10. Гвоздь забивают ударом по его шляпке штоком 3 при перемещении поршня 5 в направляющем цилиндре 4 к стволу от давления сжатого воздуха, поступающего от компрессора
| Рис. 26.13. Гвоздезабивной пневматический пистолет |
| Рис. 26.14. Электромагнитный монтажный пистолет: / — силовая катушка; 2 — пружина; 3 — опорная плита; 4 — дюбель-гвоздь; 5 — выключатель; 6 — якорь-боек; 7 — возвратная пружина |
через штуцер 8 и клапан 6 в надпоршневую полость (прямой ход). Клапан 6 открывается пусковой скобой 7 при условии, что предохранительная скоба // будет прижата к основанию (месту забивки гвоздя). После отпускания скобы 7 или (и) отжатия предохранительной скобы //доступ воздуха в надпоршневую полость прекращается, и поршень со штоком возвращается в исходное положение под давлением воздуха в аккумулирующих камерах 2, которые заряжались при прямом ходе поршня через отверстия / в направляющем цилиндре.
Электромагнитный монтажный пистолет (рис. 26.14) используют для забивки дюбелей в основание из различных материалов. Они работают от выносных компактных электронных преобразователей с частотой менее 50 Гц. Энергию единичного удара (5…22 Дж) изменяют путем изменения частоты тока.
Клепальные молотки предназначены для установки заклепок диаметром до 36 мм в отверстия соединяемых клепкой металлических конструкций и их пластического деформирования (осаживания) в холодном и горячем состояниях с образованием за-
| Рис. 26.15. Пневматический клепальный молоток: / — рукоятка с пусковым устройством; 2 — золотниковое воздухораспределительное устройство; 3 — ствол с ударной парой; 4 — концевая букса |
мыкающей головки. В качестве рабочего инструмента используют обжимки. Молотки работают в виброударном режиме. Наибольшее распространение получили пневматические клепальные молотки (рис. 26.15), представляющие собой поршневые двухкамерные машины, обычно с клапанной системой воздухораспре-деления. Основными параметрами молотков являются: энергия единичного удара, частота ударов, ударная мощность и удельный расход воздуха. Для молотков холодной клепки с использованием заклепок из алюминиевых сплавов и малоуглеродистой стали Ст1кп значения этих параметров составляют до 13 Дж; 30…45 Гц; до 400 Вт; 2,45 м3/(мин/кВт); длЯ молотков горячей клепки с использованием заклепок из стали 20кп — соответственно 22,5…70 Дж; 8… 18 Гц; 400…560 Вт; 2,45 м3/(мин/кВт). В последнее время созданы клепальные молотки с гидроприводом.
§
Для разрушения асфальтобетонных покрытий, мерзлых фунтов, скальных пород, элементов конструкций из различных строительных материалов (камня, кирпича, бетона), пробивки отверстий в стенах и перекрытиях и т. п. применяют молоткии бетоноломы.Эти машины относятся к импульсно-силовым с возвратно-поступательным движением рабочих органов (пилы или зубила — у молотков, пики или лопаты — у бетоноломов). Они выполнены по одинаковым принципиальным схемам, но отличаются друг от друга энергией удара, которая у электрических молотков составляет 2… 25 Дж, а у бетоноломов 40 Дж при электрическом и 90 Дж при пневматическом приводах. По сравнению с молотками бетоноломы имеют также большую массу. В рабочем состоянии молоток может занимать произвольное положение относительно обрабатываемого материала, а бетонолом — только вертикальное или близкое к нему положение при работе сверху вниз.
В строительстве применяют преимущественно пневматические машины, которые значительно легче электрических и обладают большей энергией удара. Они менее энергоемки в изготовлении и не требуют использования дорогостоящих материалов, безопасны и просты в обслуживании и ремонте. Их недостатком является низкий КПД и большая стоимость энергии питания. Однако решающую роль в определении себестоимости единицы продукции играют трудовые затраты, определяемые техническими параметрами машины, в том числе массой и габаритными размерами.
В пневматическом рубильном молотке(рис. 26.16) поступательное движение рабочего органа /, закрепленного во втулке подвижного ствола 2, обеспечивается за счет ударов по его хвостовику
S7
бойком 3, перемещаемым в цилиндрической части 4 ствола путем попеременной подачи в нижнюю и верхнюю полости цилиндра сжатого воздуха. Клапанный механизм 7 воздухораспределения расположен в верхней части ствола. Рукоятка 5 молотка вместе с корпусом /0виброизолирова-на пружиной 8, поступающим в камеру 9 сжатым воздухом и буфером 6.
Отечественной промышленностью выпускаются молотки с энергией удара 8… 56 Дж с частотой соответственно 40… 10 Гц и массой 5,5… 11 кг.
Для образования глухих и сквозных скважин (горизонтальных, вертикальных, наклонных) в однородных грунтах до IV категории включительно применяют пневматические пробойники (для скважин диаметром 55… 300 мм) и раскатчики грунта (для скважин диаметром 55…2000 мм).
| Рис. 26.16. Рубильный молоток |
Пневматический пробойник(рис. 26.17, а) работает в им-пульсно-силовом режиме. Он перемещается в грунте за счет возвратно-поступательного движения ударника 4, перемещающегося в корпусе 1 и наносящего удары либо по наковальне, передней части корпуса (при движении на скважину), либо по задней гайке 10 (при движении из скважины). Движение в прямом направлении, на скважину, обеспечивается подачей сжатого воздуха от компрессора по гибкому шлангу // к патрубку 7 и далее, через камеру 6 и окна 5, в полость между ударником и передней частью корпуса — камеру 3. Из-за разности воспринимающих давление сжатого воздуха площадей со стороны камер 6 и 3 ударник перемещается вправо. В конце
 2 3
2 3
5 6 7 8 9 10 11
Рис. 26.17. Пневматический пробойник (а) и горизонтальные проколы в фунте (б)
этого перемещения происходит выхлоп воздуха из камеры 3 через окна 5 в полость 8 и далее, через отверстия амортизатора 9, в атмосферу, вследствие чего ударник сначала останавливается, а затем, с возрастанием давления воздуха в камере б перемещается влево, нанося удар по наковальне. Для возвратного движения (из скважины) вращением шланга 11 и соединенного с ним патрубка 7 последний вывинчивают из гайки 10, перемещая его в положение, показанное штриховой линией, увеличивая этим ход ударника в направлении к задней гайке до сообщения окон 5 с полостью 8 так, что выхлоп отработавшего воздуха происходит одновременно с ударом ударника по задней гайке. При перемещении же ударника в направлении передней части корпуса из-за амортизирующего действия находящегося в камере 3 воздуха удара по наковальне не происходит.
Импульсное перемещение пробойника в грунте является результатом разбаланса между генерируемыми ударами активными силами и силами трения корпуса о стенки скважины. При движении ударника в обратном направлении (после удара) этот баланс восстанавливается, и возвратного перемещения всего пробойника не происходит. Поэтому необходимым условием проходки скважины пробойником является наличие сил трения между корпусом и стенками скважины. Этим объясняется, в частности, необходимость имитации указанных сил трения специальными устройствами при запуске машины.
Горизонтальные проколы в грунте выполняют обычно из предварительно отрытых приямков (рис. 26.17, б). Для предотвращения самопроизвольного вращения патрубка и изменения вслед-
ствие этого направления движения пробойника шланг от компрессора укладывают змейкой и заневоливают. В зависимости от прочности грунта и диаметра скважины последнюю пробивают несколькими проходками пробойника со сменными уширителями 2. Для проходки глухих скважин обязателен описанный выше реверс движения пробойника для его извлечения из скважины. В случае сквозных скважин могут быть применены более простые нереверсивные пробойники.
Пробойники применяют также для забивки металлических труб и анкеров, для глубинного уплотнения грунта, рыхления слежавшихся насыпных материалов и других подобных работ.
Основными параметрами пробойников являются: энергия удара на прямом ходу, частота ударов, диаметр и длина скважины, а также скорость проходки. Давление сжатого воздуха составляет 0,5…0,7 МПа, а его удельный расход — 0,05…0,22 м3/(с/кВт). Пробойники отличаются простотой устройства и обслуживания. Основной недостаток — ограниченная область применения. Их используют для работы только в однородных нескальных грунтах немерзлого состояния с каменистыми включениями не более 0,15 м. При работе в неоднородных фунтах из-за боковых реактивных сил грунта возможно значительное отклонение пробойника от заданного курса.
Раскатчики грунта(рис. 26.18) являются самодвижущимися машинами непрерывного действия, предназначенными для образования скважин в грунте методом его постепенного уплотнения рабочим органом в виде конических катков 3, установленных на шейках эксцентрикового вала 2. Первый (направляющий) каток 4
свободно посажен на ось вала, а все остальные катки с возрастанием их диаметров от лидерного к замыкающему катку свободно посажены на шейки вала, каждая из которых, а следовательно и ось поддерживаемого ею катка, развернута относительно предыдущей шейки на угол <р так, что при вращении вала происходит завинчивание всего устройства в осевом направлении (на скважину) с одновременным уплотнением
Рис. 26.18. Раскатчик фунта: грунта в стенках скважины
а — принципиальная схема; б — схема раз- обкатывающимися ПО НИМ
ворота катков катками. Реактивный мо-
мент воспринимается замыкающим катком / с ребрами по его периферии. Вращение валу передается от встроенного в замыкающий каток мотор-редуктора, питаемого электроэнергией от внешнего источника через кабель 5.
В диапазоне диаметров разрабатываемых скважин 55…250 мм мощность двигателя при скорости проходки 20 м/ч составляет 0,3…5,5 кВт, а масса машины до 150 кг. Масса наиболее мощных раскатчиков (для разработки скважин 2000 мм) достигает 25 т при мощности двигателя до 270 кВт. Они работают с частичной выемкой грунта, для чего их дооборудуют винтообразной лопастью на замыкающем катке.
§
Ручные шлифовальные машины по объему выпуска занимают второе место после ручных сверлильных машин, что объясняется большим разнообразием выполняемых ими операций и возможностью обработки самых различных материалов. Ими зачищают поверхности, сварочные швы, снимают грат после газовой резки металла, режут трубы и профильный металл, снимают фаски под сварку листового металла и труб, удаляют наплывы на металле, шлифуют металлические изделия, а также мрамор, гранит, зачищают ступени лестничных маршей и т.п. Ручные шлифовальные машины относятся к непрерывно-силовым и могут быть с вращательным, замкнутым и сложным движениями рабочего органа. В качестве приводов используют пневматические и электрические двигатели всех трех классов защиты от поражения электрическим током.
По конструктивному исполнению шлифовальные машины могут быть: с вращательным движением рабочего органа — прямыми, угловыми, торцовыми и с гибким валом; машины с замкнутым движением — барабанного типа; машины со сложным движением — площадочного типа.
В строительстве используют преимущественно машины вращательного движения. В качестве рабочего инструмента в прямых и угловых машинах и головках (в случае машин с гибким валом) применяют абразивные круги, эластичные диски, металлические щетки, а также войлочные, фетровые и хлопчатобумажные круги, реже шлифовальные шкурки на матерчатой основе. Главным параметром прямых и угловых машин и головок является диаметр абразивного круга (40… 160 мм — для прямых и 80…230 мм — для угловых).
Прямая пневматическая и угловая электрическая ручные шлифовальные машины приведены на рис. 26.19. Ротационный пнев-модвигатель 7(см. рис. 26.19, а) пневматической шлифовальной машины с прямым вращениемрабочего органа — шпинделя 5приво-
12 3 4

Рис. 26.19. Ручные шлифовальные машины: а — прямая пневматическая; б — угловая электрическая
дится в движение сжатым воздухом, поступающим от компрессора через пусковое устройство и центробежный регулятор частоты вращения после открывания впускного клапана 9 нажатием на курок 10. Вращательное движение шпинделю передается непосредственно от вала пневмодвигателя через муфту 6. Абразивный круг 2 закрепляют на конце шпинделя, зажимая его между двумя фланцами 1 и 4. Для защиты от поражения осколками абразивного круга в случае его возможного разрушения абразивный круг закрывают кожухом 3 на половину его диаметра.
В угловой шлифовальной машине(рис. 26.19, б) встроенный в ее корпус электродвигатель 13 питается электроэнергией от внешнего источника, с которым он соединен кабелем 14. Включают двигатель выключателем 75. Вращение шпинделю 12 с закрепленным на его конце рабочим инструментом 17 передается от электродвигателя через одноступенчатый конический редуктор 77. Как и в случае прямой машины, рабочий инструмент защищен на половину его диаметра кожухом 16.
Шлифовальная машина с гибким валом(рис. 26.20, а) состоит из вынесенного электродвигателя 7 и двух сменных головок — прямой (рис. 26.20, б) и угловой (рис. 26.20, в). Вращательное движение шлифовальным головкам от электродвигателя передается гибким валом 3, который соединен с двигателем кулачковой муфтой 2 одностороннего вращения. В случае включения двигателя на реверсивное движение муфта отключает гибкий вал от двигателя, предохраняя его от возможного повреждения при таком включе-
| Рис. 26.20. Ручная шлифовальная машина с гибким валом (а) и прямой (б) и угловой (в) сменными головками |
нии. Другой конец гибкого вала соединяется с одной из указанных выше шлифовальных головок. Оператор удерживает шлифовальную головку за рукоятку 5 (см. рис. 26.20, б и в), облицованную виброзащитным слоем на резиновой основе. Прямая головка снабжена, кроме того, дополнительной рукояткой 4 для прижатия рабочего инструмента к обрабатываемой поверхности.
Эффективность работы шлифовальных машин в значительной мере зависит от режима работы, прежде всего, от стабилизации частоты вращения рабочего органа при изменении внешней на-
грузки, а также от прочности и износостойкости рабочего инструмента. В машинах с асинхронными электрическими двигателями стабильность частоты вращения обеспечивается жесткой механической характеристикой самого двигателя, а в машинах с коллекторными двигателями, имеющими мягкую механическую характеристику, для этой цели применяют электронные регуляторы, дублированные независимыми центробежными предохранительными устройствами. Их устанавливают на валу якоря двигателя. Они отключают питание двигателя от сети при превышении номинальной частоты вращения более чем на 15 %. Эта мера вызвана необходимостью предотвратить разрыв шлифовального круга при запредельной частоте его вращения на холостом ходу в случае выхода из строя электронного регулятора.
В машинах с пневматическими двигателями частоту вращения стабилизируют центробежными регуляторами 8(см. рис. 26.19, а), частично перекрывающими входное отверстие для сжатого воздуха, поступающего в двигатель, при повышении его частоты вращения и тем самым уменьшающим последнюю.
Шлифовальные кругииспользуют в качестве основного вида рабочего инструмента при работе шлифовальных машин с вращательным движением рабочего органа. Они состоят из естественных или искусственных абразивных кристаллов высокой твердости и прочности и керамической, бакелитовой или вулканито-вой связок. Круги с керамической связкой обладают высокой прочностью и износостойкостью, не засаливаются и легко режут металл, но чувствительны к ударным нагрузкам и нагрузкам на изгиб и не применяются для работы с окружной скоростью более 35 м/с. Круги с бакелитовой связкой обладают высокой прочностью и упругостью, что позволяет изготавливать их толщиной менее 1 мм и работать со скоростью до 75 м/с при выполнении отрезных операций. Круги с вулканитовой связкой более упруги, они эластичны, обладают высокой режущей способностью, но имеют низкую теплостойкость, из-за чего их рабочие скорости не превышают 18 м/с.
Для резки различных материалов применяют армированные отрезные круги,состоящие из электрокорунда или карбида кремния, бакелитовой связки, стеклосетки и металлической втулки для точной посадки круга на шпиндель машины. Допустимая скорость этих кругов 80… 110 м/с. Армированные круги обладают повышенной стойкостью на излом при боковых нагрузках. При резке круг подают на разрезаемую деталь так, чтобы плоскость его вращения была перпендикулярна разрезаемой поверхности, а при зачистке угол между плоскостью вращения круга и зачищаемой поверхностью должен быть в пределах 15…40°.
Плоско- и ленточно-шлифовальные машины применяют для выполнения доводочных работ. В плоскошлифовальной машине ра-
бочий орган в виде платформы с закрепленной на ней шлифовальной шкуркой совершает сложное, возвратно-поступательное или орбитальное плоскопараллельное движение в плоскости обработки. Основными параметрами этих машин являются размер платформы и частота возвратно-поступательных движений.
Рабочим органом ленточно-шлифовальной машины является натянутая на два барабана (приводной и натяжной) бесконечная абразивная лента, совершающая движение по замкнутой траектории. Основными параметрами этих машин являются размеры абразивной ленты и скорость ее движения. Оба типа машин оборудуют устройствами для отсоса пыли — продуктов шлифования.
§
Для разрезания как гладкого, так и гофрированного листового металла, арматуры и других материалов применяют вырубные, ножевые, прорезные, дисковые и рычажные ножницы с электрическим, пневматическим или гидравлическим приводом. Наибольшее распространение в строительстве получили вырубные и ножевые ножницы, пригодные для резки металла толщиной до 4 мм, в то время как, например, дисковые ножницы способны разрезать металл толщиной не более 1 мм.
Вырубные ножницыобеспечивают точность раскроя, чистоту реза и ровность кромок. Рабочим органом вырубных ножниц служит ползун 3 (рис. 26.21, а) с закрепленным в нем пуансоном 2, совершающий возвратно-поступательное движение от электрического или пневматического двигателя через редуктор (на рис. 26.21, а не показаны), эксцентриковый вал 5 и шатун 4. В процессе резания используется принцип долбления. При разрезании листового материала «от края» его заводят в щель между матрицей / и пуансоном 2, после чего включают двигатель и, по мере вырубания прорези шириной, равной диаметру рабочей части пуансона, перемещают машину по размеченному для вырубки контуру. За каждый ход пуансона снимается стружка серповидной формы. При вырубании люков и окон в середине листовой заготовки сначала на границе вырубаемого контура просверливают отверстие, в которое заводят держатель с матрицей, после чего работают по описанной выше схеме. Разновидностью вырубных ножниц являются кромкорезы, предназначенные для подготовки кромок деталей под сварку.
Ножевые ножницы(рис. 26.21, б) предназначены для резки листового металла в основном от края листа. Приводная часть ножевых ножниц унифицирована с вырубными ножницами. Режущая головка состоит из подвижного 8 и неподвижного 6 ножей, закрепленных соответственно в ползуне и на улитке 7. Металл раз-


Рис. 26.21. Вырубные ножницы (а) и режущая головка ножевых ножниц (б)
резают в результате возвратно-поступа
тельного движения подвижного ножа при
ручной подаче во время его холостого хода.
Неподвижные ножи могут иметь наклон
ную, как показано на рис. 26.21, б, или пер
ст пендикулярную направлению движения
подвижного ножа режущую кромку. В по
следнем случае снижается усилие ручной подачи. Скорость реза
ния ножевыми ножницами выше, чем вырубными.
Производительность ножевых ножниц
Kn(2e-f) lOOOtgP ‘
где П — производительность ножевых ножниц, м/мин; К — коэффициент отдачи (К = 0,7…0,9); п — частота двойных ходов подвижного ножа в минуту; е — эксцентриситет эксцентрикового вала, мм;/— коэффициент, учитывающий упругую деформацию деталей механизма головки, мм (/= 1,1 мм); р— угол между кромками ножей в вертикальной плоскости, °.
Для резки труб диаметром до 1200 мм и обработки фасок на их торцах под сварку применяют труборезыс рабочим инструментом в виде резцов, абразивных отрезных кругов, дисков, ножевых и ленточных полотен.
Труборезы с резцовым инструментом имеют электрический или пневматический двигатель мощностью 0,6 кВт и рабочую головку с планшайбой и закрепленными на ней резцами. Планшайбу с отверстием в ее средней части закрепляют на трубе. Последнюю
обрабатывают путем вращения планшайбы и радиальной подачи резцов. Труборезы этого типа (массой до 26 кг) обрабатывают трубы из углеродистых сталей диаметром 15… 20 и 245… 273 мм при толщине стенок 5…25 мм.
Труборезы с рабочим инструментом в виде абразивного круга для обработки труб диаметром 150… 1200 мм с толщиной стенок до 15 мм чаще всего изготавливают на базе угловых шлифовальных электрических ручных машин, устанавливаемых на специальных каретках, обкатывающихся по окружности трубы.
Шаберыиспользуют для чистовой обработки поверхностей и кромок металлических деталей. Шаберы совершают возвратно-поступательное движение с размахом 20 мм и частотой 20 Гц. Привод может быть электрическим или пневматическим с эксцентриковым преобразовательным механизмом.
Для очистки труднодоступных металлических поверхностей и кромок применяют зачистные молоткивиброударного действия с рабочим инструментом в виде зубила (зубильно-зачистные молотки) и пучка стальных подвижных игл, встроенных в промежуточный поршень, на который воздействует ударник {пучковые зачистные молотки). Наибольшее распространение получили пневматические зачистные молотки с энергией удара 1 …8 Дж и частотой ударов 60 Гц.
26.7. Ручные машины для распиловки, долбежки и строжки материалов
В эту группу ручных машин входят пилы, рубанки и долбежни-ки обычно с приводом от электродвигателей. По сравнению с машинами для резания металлов деревообрабатывающие машины имеют более высокие скорости резания (до 30…50 м/с). Мощность их приводных двигателей превышает 0,6 кВт. Эти машины оборудуют устройствами для сбора стружки и пыли.
Дисковые пилы(рис. 26.22) получили наибольшее распространение для распиловки древесины. Их применяют для продольного и поперечного резания древесных материалов толщиной до 100 мм, а также для изготовления в столярных изделиях цапф и шипов, для пригонки деталей при монтаже деревянных конструкций и других подобных работ.
Рабочий инструмент дисковой пилы — стальной пильный диск 5 с зубьями на его периферии — закреплен на выходном валу одноступенчатого цилиндрического редуктора, приводимого во вращение электродвигателем 1. Двигатель, редуктор и пильный диск закреплены на опорной плите 7 в кронштейнах 3, позволяющих устанавливать пильную головку под углом 45… 90° к плите. Глубину пропила регулируют винтом 2. Для безопасности работ диск огражден подпружиненным кожухом 4. Для более точного реза
служит направляющая линейка 6. Для предотвращения заклинивания пильного диска при продольной распиловке позади него устанавливают клин, своим нижним концом расширяющим пропил.
| Рис. 26.22. Дисковая пила |
Основными параметрами дисковых пил являются максимальная глубина пропила (45… 100 мм), диаметр пильного диска (125…250 мм) и частота его вращения на холостом ходу (1500…4500 мин’1, большие значения соответствуют меньшим диаметрам пильного диска). Дисковые пилы применяют также для резки мрамора, камня и других материалов, заменяя пильный диск на абразивный.
Цепные ручные пилыиспользуют в основном для поперечной распиловки древесины инструментом в виде цепи с режущими и скалывающими звеньями, огибающей ведущую и натяжную звездочки и движущейся по замкнутой траектории в плоскости рабочей шины. В качестве приводных двигателей наиболее часто используют двухтактные ДВС и электрические коллекторные двигатели с двойной изоляцией. В последнее время в этих машинах применяют также гидропривод. Основными параметрами цепных пил являются: наибольший диаметр распиливаемой древесины (до 600 мм и более), длина рабочей шины, ширина пропила и скорость движения цепи.
Цепные ручные пилы используют также для резания кирпичной кладки и других каменных материалов, для чего режущие части зубьев цепей армируют твердосплавными вольфрамо-кобаль-товыми пластинками.
Ножовочные ручные пилыприменяют как для прямолинейного, так и для фасонного (криволинейного с использованием гибких ножовочных полотен) резания дерева, пластмасс и металлов. Их рабочим инструментом является ножовочное полотно с горизонтальным {ножовка) или вертикальным (лобзик) расположением. При распиловке рабочий инструмент движется возвратно-поступательно, совершая рабочий ход в одном направлении и холостой ход в возвратном направлении при ручной подаче в направлении распила. Ножовочные полотна весьма чувствительны к из-гибным нагрузкам, особенно при распиловке металлов, поэтому для предотвращения их поломки плоскость полотна располагают строго перпендикулярно к распиливаемой поверхности.
В приводах ножовочных ручных пил наиболее часто используют электрические и пневматические двигатели, кривошипно-ша-тунные и эксцентриковые механизмы для преобразования враща-
тельного движения вала двигателя в возвратно-поступательное движение рабочего органа — ползуна — с закрепленным на нем ножовочным полотном. При использовании ножовочных ручных пил для резки металлических труб и профильного металла их комплектуют специальными зажимными приспособлениями.
К основным параметрам ножовочных ручных пил относятся: размеры распиливаемых материалов, ширина или глубина пропила, ход (20…60 мм) и частота ходов (до 350 мин ‘ при обработке металлов и до 3800 мин’ при обработке дерева) ножовочного полотна. Машины для фасонной резки характеризуют также минимальным радиусом пропила на закруглениях, который составляет для древесины и пластмасс 15… 30 мм.
Долбежники(рис. 26.23) предназначены для выборки пазов и гнезд прямоугольного поперечного сечения в деревянных изделиях. Дол-бежник представляет собой разновидность цепной пилы, установленной на опорных стойках Зс возможностью вертикальной подачи вниз оператором с помощью рычажной рукоятки /. В исходное положение машина возвращается пружинами 4. В приводах долбежни-ков чаще всего используют электрические асинхронные двигатели 2. Машину закрепляют на обрабатываемой детали (изделии) крепежными устройствами 5. В рабочем режиме рабочая шина 6 с долбежной цепью своим торцом врезается в обрабатываемую деталь, оставляя после ее возврата в исходное положение готовый паз (гнездо), по форме и размерам соответствующий поперечному контуру торцовой части рабочей шины. Для образования пазов большой ширины применяют шины с многорядными цепями.
Фрезерные машинывращательного действия применяют для образования углублений в различных материалах (металле, дереве, пластмассах и др.). Рабочим инструментом фрезерной машины является фреза для радиального или торцового фрезерования. Наиболее широко используют машины с пальцевыми фрезами, закрепляемые на шпинделе машины цанговыми захватами. Фрезерная машина этого типа представляет собой фрезерную головку, перемещаемую оператором с помощью рукояток по вертикальным цилиндрическим направляющим. Наиболее часто в этих машинах используют электропривод мощностью 0,6…2 кВт. Фрезерные машины оснащены электронной системой защиты от перегрузок, устройством плавного регулирования частоты вращения шпинделя, устройствами для регулирования глубины фрезерования.
Разновидностью фрезерных машин для обработки каменных материалов являются бороздоделы,предназначенные для образования борозд и пазов в бетоне, железобетоне и кирпиче при выполнении санитарно-технических, электромонтажных, штукатурных, облицовочных и каменных работ, в том числе для образования отверстий и выборки гнезд под розетки, выключатели и распределительные коробки. Основным рабочим инструментом ЯВЛЯЛО

Рис. 26.23. Долбежник
ется дисковая фреза с алмазными зубьями, защищенная кожухом, сменным инструментом — сверлильная насадка для шлямбурных резцов с забурником с твердосплавными пластинами. Основными параметрами являются ширина и глубина паза, образующегося за один проход. Бороздоделы приводятся в движение электрическими двигателями мощностью от 270 Вт и более. Их оснащают устройствами для водяного охлаждения инструмента и отсоса пыли.
В начале рабочего процесса бороздодел врезается в обрабатываемый материал на полную глубину, после чего его перемещают вручную вдоль разметки паза. Для облегчения перемещения бороздоделы оснащают роликовыми опорами.
Рубанки(рис. 26.24) предназначены для строгания различных деревянных изделий. Рабочим органом служит вращающийся барабан 8 с закрепленными на его периферии двумя ножами, приводимый в движение электродвигателем 4 через клиноременную передачу или зубчатый редуктор. Корпус 2 рубанка с рукояткой 6
П

Рис. 26.24. Электрорубанок
и пусковым устройством 5 в задней части опирается на заднюю плиту 7 и переднюю опору 1. Толщину снимаемой стружки регулируют винтом 3, изменяющим высотное положение опоры 1. Основными параметрами рубанков являются ширина (75… 160 мм) и глубина (1…3 мм) строгания за один проход.
Для строгания рубанок перемещают вручную по обрабатываемой поверхности в пределах захватки, после чего его возвращают на исходную позицию для строгания смежной полосы или повторного прохода по прежней полосе. Рубанок можно использовать также в стационарном варианте, установив его неподвижно на верстаке ножами вверх и перемещая вдоль него обрабатываемую деталь. Для этого верстак оборудуют горизонтально установленными плоскими направляющими строго в плоскости опорных плит рубанка.
Рабочие органы машин для обработки древесины имеют множество острых кромок, движущихся с высокой скоростью, в связи с чем эти машины являются средствами повышенной опасности. В числе мер их безопасной эксплуатации органы управления этими машинами выполняют таким образом, чтобы движение рабочему органу передавалось только при удержании пускового устройства (курка, рукоятки) пальцем руки оператора, а при его отпускании машина останавливалась бы. Эта мера исключает возможность работы неуправляемой машины. Защитные кожухи пил и стационарных рубанков закрывают рабочие органы и инструменты на холостом ходу. По окончании процесса резания они автоматически возвращаются в исходное положение.
Контрольные вопросы
1. Какие машины относятся к ручным? Приведите их классификацию
по принципу действия, характеру движения рабочего органа, режиму
работы, назначению и области применения, виду привода, конструк
тивному исполнению. Как индексируют ручные машины?
2. Охарактеризуйте классы защиты ручных электрических машин. Ка
ким требованиям должна отвечать ручная машина?
47!
3. Какие машины применяют для образования отверстий в различных
материалах? Как устроены, как работают и каковы основные параметры
ручных сверлильных машин вращательного и ударно-вращательного дей
ствия; ручных электромеханических, электромагнитных и пневматиче
ских перфораторов. Перечислите виды сверл, используемых при работе
сверлильных машин и охарактеризуйте их. Каким рабочим инструмен
том оснащают перфораторы?
4. Какие машины применяют для крепления изделий и сборки конст
рукций? Как устроены, как работают и каковы основные параметры ча-
стоударных и редкоударных гайковертов, шуруповертов, резьбонарезных
машин; пороховых, пневматических гвоздезабивных, электромагнитных
и клепальных молотков?
5. Какие машины применяют для разрушения прочных материалов?
Как они устроены, как работают и каковы их основные параметры? Ка
кими рабочими инструментами их комплектуют?
6. Какие машины применяют для работы по грунту? Как устроены,
как работают и каковы основные параметры пневматических пробойни
ков, раскатчика грунта?
7. Какие машины применяют для шлифования материалов? Как устро
ены, как работают и каковы основные параметры пневматических и элек
трических шлифовальных машин, машин с гибким валом, плоскошли
фовальных и ленточно-шлифовальных машин? Для чего и как стабили
зируют частоту вращения рабочего органа шлифовальной машины? Ка
кими рабочими инструментами комплектуют шлифовальные машины?
Охарактеризуйте их.
8. Какие машины применяют для резки, зачистки поверхностей и
обработки кромок материалов? Как устроены, как работают и каковы
основные параметры вырубных и ножевых ножниц, труборезов, зачист-
ных молотков? Какими рабочими инструментами комплектуют эти ма
шины?
9. Какие машины применяют для распиловки, долбежки и строжки
материалов? Как устроены, как работают и каковы основные параметры
дисковых, цепных и ножовочных пил, долбежников, фрезерных машин,
бороздоделов и рубанков? Какими рабочими инструментами комплекту
ют эти машины?
10. Каковы особенности управления деревообрабатывающими маши
нами, связанные с обеспечением их безопасной работы?
Список литературы
1. Борисов Ю. Л/., Соколов М. М. Электрооборудование подъемно-транс
портных машин: Учеб. для вузов. — 2-е изд., перераб. и доп. — М.: Маши
ностроение, 1971. — 376 с.
2. Вайнсон А.А. Подъемно-транспортные машины: Учеб. для вузов. —
4-е изд., перераб. и доп. — М.: Машиностроение, 1989. — 536 с.
3. Васильев А. А. Дорожные машины: Учеб. для техникумов. — 3-е изд.,
перераб. и доп. — М.: Машиностроение, 1987. — 416 с.
4. Волков Д. П., Николаев С. Н. Надежность строительных машин и обо
рудования: Учеб. пособие для вузов. — М.: Высш. шк., 1979. — 400 с.
5. Давидович П. Я., Крикун В.Я. Траншейные роторные экскаваторы. —
М: Недра, 1974. — 320 с.
6. Дегтярев А.П., РеишА.К, Руденский СИ. Комплексная механиза
ция земляных работ. — 2-е изд., перераб. и доп. — М.: Стройиздат, 1987. —
335 с.
7′. Добронравов С. С. Строительные машины и оборудование: Справочник. — М.: Высш. шк., 1991. — 456 с.
8. Дроздов А. Н. Ручные машины для строительно-монтажных работ: Учеб.
пособие. — М.: МГСУ, 1999. — 252 с.
9. Евдокимов В.А. Механизация и автоматизация строительного про
изводства: Учеб. пособие для вузов. — Л.: Стройиздат. Ленингр. отд-ние,
1985.-195 с.
10. Ким Б. Г. Обеспечение работоспособности и исправности парков стро
ительной техники: Учеб. пособие. — Владимир: Владим. гос. ун-т, 2000. —
148 с.
11. Колесниченко В. В. Справочник молодого машиниста бульдозера,
скрепера, грейдера. — М.: Высш. шк., 1988. — 224 с.
12. Мартынов В.Д., Алешин Н.И., Морозов Б. П. Строительные маши
ны и монтажное оборудование: Учеб. для вузов. — М.: Машиностроение,
1990.-352 с.
13. Машины для земляных работ: Учеб. для вузов / Д.П.Волков,
В.Я.Крикун, П.Е.Тотолин и др.; Под ред. Д. П.Волкова. — М.: Машино
строение, 1992. — 448 с.
14. Невзоров Д.А., Гудков Ю.И., Полосин М.Д. Устройство и экс
плуатация грузоподъемных кранов: Учеб. для нач. проф. образования. —
М.: ИРПО; Изд. центр «Академия», 2000. — 448 с.
15. Панкратов Г. П. Двигатели внутреннего сгорания, автомобили, трак
торы и их эксплуатация. — 3-е изд., перераб. и доп. — М.: Высш. шк., 1984. —
296 с.
16. Раннее А. В. Одноковшовые строительные экскаваторы: Учеб. — М.:
Высш. шк., 1991.
17. Раннее А. В., Полосин М.Д. Устройство и эксплуатация дорожно
строительных машин: Учеб. для нач. проф. образования. — М.: ИРПО; Изд.
центр «Академия», 2000. — 488 с.
18. Российская архитектурно-строительная энциклопедия. Т. 1. Стройин-
дустрия, строительные материалы, технология и организация производ
ства работ. Строительные машины и оборудование. — М.: Триада, 1995. —
496 с.
19. Сидоров В. И. Автоматизация работы строительных машин: Учеб.
для техникумов. — М.: Стройиздат, 1989. — 240 с.
Строительные машины: Учеб. для вузов / Д.П.Волков, Н.И.Алешин, В.Я.Крикун, О.Е.Рынсков; Под ред. Д.П.Волкова. — М.: Высш. шк., 1988.-319 с.
20. Техническая механика: Учеб. для техникумов / А. А. Эрдеди, И. В. Ани
кин, Ю.А.Медведев, А.С.Чуйков. — 2-е изд., перераб. — М.: Высш. шк.,
1980. — 446 с.
21. Хархута Н.Я. Машины для уплотнения грунтов. — Л.: Машино
строение. Ленингр. отд-ние, 1973. — 176 с.
22. Шкундин Б. М. Оборудование для гидромеханизации земляных ра
бот. — М.: Энергия, 1970. — 240 с.
23. Экскаваторы непрерывного действия: Учеб. пособие / 3. Е.Гарбу-
зов, В.М.Донской и др. — 2-е изд., перераб. и доп. — М.: Высш. шк., 1980. —
303 с.
Землеройно-транспортные машины зтм. бульдозеры, грейдер-элеваторы
Землеройно-транспортными называют такие машины, которые за
счет тягового усилия послойно отделяют грунт от массива и транспортируют его
к месту укладки (отсыпки) в процессе собственного перемещения. Исключение
составляют грейдер-элеваторы (см. ниже), у которых грунт транспортируется и
отсыпается в отвал или в транспортные средства специальным транспортирующим
органом одновременно с его разработкой.
По режиму работы ЗТМ делят на машины цикличного
(бульдозеры, грейдеры, скреперы) и непрерывного (грейдер-элеваторы) действия.
По конструкции рабочего оборудования различают отвальные и ковшовые ЗТМ. У
первых рабочий орган выполнен в виде отвала, оснащенного в его передней части
ножами (бульдозеры, грейдеры) или дискового плута (грейдер-элеваторы).
Ковшами оборудуют скреперы. По признаку подвижности ЗТМ относят к передвижным
машинам. В последние годы все большее распространение получают самоходные ЗТМ
(бульдозеры, скреперы, автогрейдеры). Реже применяются прицепные машины (скреперы,
грейдер-элеваторы).
Рабочий процесс ЗТМ цикличного действия состоит из
операций отделения грунта от массива (копания), его транспортирования к месту
укладки (отсыпки), разгрузки и возвращения машины на исходную позицию. Грунт
отделяют от массива гладкими или оснащенными зубьями ножами за счет тягового
усилия тягача. В зависимости от вида рабочего оборудования отделенный грунт
накапливается перед отвалом или поступает в ковш, которыми он
транспортируется к месту отсыпки. Скорости передвижения ЗТМ выбирают в
зависимости от преодолеваемых сопротивлений. При копании скорости машины
минимальны, меньше при разработке прочных и больше при разработке слабых
грунтов. При транспортировании грунта сопротивления пере-движению ЗТМ ниже,
чем при копании. Поэтому в транспортном режиме скорости передвижения машины
увеличатся. Еще большими они будут при возвращении машины на исходную позицию
вследствие снижения сопротивлении передвижению разгруженной машины. При
движении по уклонам под гору скорости увеличиваются, а при движении в гору
снижаются. При движении по дорогам скорости ограничиваются нормами
Госавтоинспекции. Скорости передвижения ЗТМ могут быть также ограничены по
технологическим соображениям, например, возможностью оптимального управления
грейдером или бульдозером при планировочных работах. В большинстве случаев
ЗТМ переметаются передним ходом. Некоторые виды работ в зависимости от
местных условий могут выполняться по челночной схеме с возвратом машины на
исходную позицию задним ходом, например при засыпке траншей и котлованов
бульдозером, при планировочных работах на коротких по длине участках.
Все операции рабочего цикла ЗТМ непрерывного действия
(копание, транспортирование и разгрузка грунта) совмещаются во времени. При
этом для копания используется землеройный рабочий орган, а для перемещения и
отсыпки грунта — специальный транспортирующий орган в виде ленточного
конвейера.
ЗТМ особенно эффективны на массовых разработках грунтов.
Производительность машины при разработке грунта скреперами с дальностью возки
0,5…1,5 км составляет в среднем 5…40 тыс. м3 грунта в год при стоимости
разработки 1 м3 грунта 0,6…0,19 руб. и удельном расходе энергии 6…3,2
кВт-ч/м3. При работе бульдозеров с дальностью возки 50… 100 м соответственно: 6…76 тыс. иэ грунта в год, 0,25… 0,08,5 руб. на I м3 грунта и 2,4..Л,6
кВт-м
По этим показателям ЗТМ не уступают самой дешевой
экскаваторной разработке грунта с его транспортированием по железной дороге.
Для машин очень большой мощности производительность труда повышается в
2…2,5 раза, а стоимость разработки грунта снижается в 1,5…2 раза.
Бульдозеры. Бульдозеры предназначены для послойной
разработки грунтов с их последующим перемещением перед рабочим органом
(отвалом) по поверхности земли на небольшие расстояния. Их используют при
сооружении выемок и насыпей, обратной засыпке траншей и котлованов, грубой
планировке земляной поверхности, разравнивании грунтовых отвалов при работе
экскаваторов и земле-возов, устройстве террас на косогорах, штабелировании и
перемещении сыпучих материалов, подготовительных работах для валки отдельных
деревьев, срезки кустарника, корчевки пней, удаления камней, расчистки
поверхности от мусора, снега, на вскрышных работах, а также в качестве
толкачей скреперов. Эффективность работы бульдозеров в значительной мерс
зависит от проходимости базового трактора и его тягово -сцепных свойств.
Бульдозеры выполняют как навесное оборудование на
пневмоколесных и гусеничных тракторах 8 ( 4.27, а). Рабочее оборудование в
виде отвала 5 с ножами 4 в его нижней части навешивают на трактор через два
толкающих бруса 2 ( 4.27, б) или универсальную раму 3 ( 4.27, у), которые
имеют шарнирные соединения / с боковыми балками ходовых тележек трактора или
с кронштейнами его нижней рамы (при пневмоколес-ном тракторе). Вместе с
толкающими брусьями и раскосами 6′ (см. 4.27, а) отвал образует жесткую
систему, которая с помощью одного или двух гидравлических цилиндров 7 может
подниматься и опускаться, поворачиваясь в вертикальной плоскости относительно
шарниров /. При этом режущая кромка ножей отвала всегда остается
перпендикулярной продольной оси машины. По второй схеме отвал соединяют с
универсальной рамой шаровым шарниром 12 ( 4.27, е) и двумя толкателями 10,
задние шарниры 9 которых закреплены в ползунах, переме-
щающихся по направляющим боковых балок подковообразной
универсальной рамы и фиксируемых в требуемых положениях закладными штырями.
Горизонтальный поворот отвала с отклонениями в каждую сторону на угол до
30…36° выполняют двумя гндроцнлиндрамн //. Отвалы, навешенные на базовый
трактор по этой схеме, называются поворотными (в плане) в отличие от
неповоротных отвалов, навешенных по схеме 4.27, 6. Их применяют для обратной
засыпки траншей и котлованов, на планировочных работах, для очистки площадей
от строительного мусора и т. п. Замена раскосов в постоянной длины винтовыми
стяжками (талрепами) или гидроцилиндрами, способными изменять свою длину,
обеспечивает регулирование угла резания и поперечный перекос отвала на угол
до 12″ в каждую сторону f 4.27, г). Угол резания регулируют одинаковым
изменением длин обоих раскосов, а для установки отвала с поперечным перекосом
каждому раскосу задают разную длину. С теми же целями в схеме поворотных
отвалов изменяют положение шарниров 9 (см. 4.27, в) по высоте ползунов. За
счет поперечных перекосов отвала удается сократить число повторных проходок
при планировке поверхностей с поперечными уклонами и на косогорах и повысить
тем самым производительность машины.
Бульдозеры могут быть дополнительно оборудованы навешиваемыми
в задней части базового трактора рыхлителями для предварительного рыхления
мерзлой корки грунтов перед их разработкой отвалом, рыхления прослоек плотных
грунтов и т. п. Рыхлители обеспечивают автономную работу бульдозера в широком
диапазоне грунтовых условий без привлечения для ‘-^того других машин и
оборудования. Устройство и принцип работы рыхлителей приведены ниже в § 4.5.
Наряду с описанными в строительстве иногда применяют 1акже
бульдозеры с канатным подъемом отвала. По сравнению с гидрофицнрованнымн
бульдозерами эти машины малоэффективны, особенно при послойной разработке
плотных грунтов, где сила тяжести рабочего оборудования оказывается
недостаточной
для внедрения отвала в грунт. Их применяют главным образом
на разработке легких грунтов, очистке поверхностен от мусора, снега и на
других работах, где сила нормального давления рабочего органа на грунт не
является определяющей.
Эффективность работы бульдозеров может быть повышена за
счет установки сменного рабочего оборудования, которое также расширяет
область применения эгид машин- В частности, для работы в плотных грунтах
применяют отвалы оборудованные одним передним и двумя задними зубьями. При
движении машины задним ходом задние зубья прорезают в грунте прорези, а при
последующем движении передним ходом грунт дополнительно разрыхляют передним
зубом и захватывают отвалом. Для изламывания асфальтовых покрытий при ремонте
дорог применяют отвалы 14, оборудованные киркой в средней части. Мерзлые
грунты разрабатывают отвалами 15 с гребенчатыми ножами или с установленными
на ножах зубьями. Для одновременной планировки откосов и их подошвы отвал
дополнительно оборудуют наклонной наставкой 16 с жестким или шарнирным
соединением с основным отвалом. В последнем случае наклон наставки регулируют
специально установленным гидроцилиндром. Установка соответствующего профиля
наставки в средней части отвала 17 позволяет выполнять очистку и планировку
канав. Для перемещения грунта от стен зданий применяют отвальную приставку
18, двигаясь при этом задним ходом. Эффективность работы бульдозера на
расчистке поверхностей от кустарника и мелких деревьев существенно повышается
за счет установки в средней части отвала кусторезного ножа 19. Установка
на отвалы грузовых вил
20 или траверс с подъемными крюками
21 позволяет использовать бульдозеры для
грузоподъемных работ.
Для послойной разработки грунта отвал бульдозера опускают
на грунт ( 4.28, а) и, перемещаясь вперед на рабочей скорости Ор ( 4.28, б),
заглубляют его за счет сил тяжести рабочего оборудо-
вания, а также принудительно гидроцилиндрами. В процессе
перемещения машины грунт отделяется от массива ножами отвала, перемещается но
отвалу вверх ( 4.29, а) и, переваливаясь вперед в его верхней части,
накапливается перед отвалом в виде тела 3 ( 4.28, в), называемого призмой
волочения и ограниченного передним и боковыми откосами, отвалом 2 и его
боковыми щеками /. После заполнения отвала, когда призма волочения достигнет
уровня его верхнего обреза, а при разработке весьма прочных грунтов, когда
тягового усилия трактора окажется недостаточно для дальнейшего накапливания
грунта перед отвалом, последний поднимают, выводя его режущую кромку на
уровень дневной поверхности земли или несколько выше, и переключают ходовой
механизм на транспортную скорость с’г ( 4.28, г). В таком режиме грунт
перемещают перед отвалом до места его отсыпки. Последнюю выполняют движением
бульдозера вперед с дополнительным подъемом отвала ( 4.28, д) или движением
назад ( 4.28, е). В первом случае грунт отсыпается
слоем постоянной толщины, определяемой зазором между
режущей кромкой и поверхностью ненарушенного или ранее отсыпанного грунта, и
частично уплотняется ходовой частью машины. Во втором случае после разгрузки
отвала остаются бугры, подлежащие дополнительному разравниванию. Частным
случаем второго варианта является засыпка ям, траншей, котлованов и т. п.
(см. 4.28, ж). Для возвращения бульдозера на исходную позицию его
поворачивают для движения в обратном направлении на максимально возможной
скорости переднего хода ом ( 4.28, з). Перед началом нового рабочего цикла
следует повторный поворот машины для движения в направлении разработки
грунта. На коротких участках транспортирования целесообразно в обратном
направлении двигаться задним ходом также на максимально возможной скорости им
( 4.28, и).
Бульдозеры с поворотным отвалом, выполняющие планировочные
работы, а также очистку поверхностей от строительного мусора, снега, работают
в режиме машин непрерывного действия. Б этом случае отделенный от массива
грунт (или другие материалы) перемешается по отвалу вверх и в сторону его
наклона в плане по винтовым траекториям 1 ( 4.29, б). При этом призма
волочения, увлекаемая потоками грунта, непрерывно перемещается в сторону
наклона отвала (направление 2) за его край и укладывается в виде валика
параллельно с направлением движения машины. Такое взаимодействие рабочего
органа с грунтом, которое приводит к сдвигу грунта вдоль режущей кромки,
называют косым резанием. При косом резании возникают дополнительные
сопротивления перемещению грунта вдоль отвала.
При работе в легких грунтах в конце копания при полном
заполнении отвала может оказаться резерв тяги н сцепных свойств трактора. В
этом случае для повышения производительности машины ее целесообразно
оборудовать отвалами с развитыми уширнтелямн / ( 4.31, а), боковыми
открылками 2 п удлинителями 3. С той же целью грунт разрабатывают двумя
спаренными бульдозерами ( 4.31, 6) или бульдозером с широким отвалом на двух
спаренных тракторах ( 4.31, в). Кроме того, производительность бульдозеров,
работающих на отсыпке насыдей, можно повысить за счет сокращения потерь
грунта при транспортировании спаренными бульдозерами (см. 4.31, б),
за счет примыкания их
отвалов и устранения таким ооразом утечки грунта черен
внутренние края каждого отвала. Если не предъявляется особых требовании к
сохранности поверхности пути транспортирования, то потери грунта через
боковые края отвала можно восполнить дополнительной разработкой грунта по
пути транспортирования при незначительном заглублении отвала.
Удовлетворительные результаты дает также перемещение грунта траншейным
способом. Для ;этого груженые бульдозеры перемещаются по одной и той же
трассе со слегка заглубленными отвалами. Образовавшаяся в результате
иосле-донательных проходок бульдозеров продольная выемка (траншея) небольшой
глубины, а также боковые валики из просыпавшегося на предшествующих проходках
грунта ( 4.31, г) снижают его потери по пути передвижения. С той же целью
выбирают оппшальный вариант трассы передвижения бульдозеров, предпочитая
движение по горизонтальной траектории (см. ряс 4.30) или под уклон. При
условии снижения потерь грунта в процессе его транспортирования приведенная
ранее предельная дальность возки может быть увеличена.
Повышения производительности бульдозера можно также
добиться за счет сокращения продолжительности рабочего цикла. Кроме известных
рекомендаций работы на максимально возможных скоростях передвижения
рассмотрим рациональные отношения продолжительности операции копания и
транспортирования грунта. Как показывает анализ составляющих силы
сопротивления передвижению бульдозера, при постоянной толщине стружки во
время копания грунта тя-гово-сцепные свойства машины реализуются в полной
мере лишь в конце копания. Во все остальное время этой операции эти свойства
оказываются недоиспользованными. Поэтому целесообразно в начальной стадии
копания, когда сопротивления W,- и Wn еще весьма малы, за короткое время
максимально заглубить отвал до полного использования тягово-сцепных свойств
машины ( 4.31, д). По мере накопления грунта перед отвалом и возрастанием в
связи с этим сопротивлений Wr и Wn, постепенно выглуб-ляют отвал, уменьшая
тем самым сопротивление Wp при условии баланса общего сопротивления. Такая
схема работы позволяет уменьшить длину участка копания и сократить
продолжительность операции. Незначительное вследствие этого приращение пути
транспортирования не окажет существенного влияния на увеличение
продолжительности транспортной операции, выполняемой на большей скорости по
сравнению со скоростью копания. Полученную при этом форму выемки называют
рациональным продольным профилем. Заметим, что толщину среза нельзя уменьшать
ниже некоторого допустимого минимального значения, при котором срезаемый слой
грунта еще способен пробиться сквозь толщу грунта внутри призмы волочения для
ее нормального формирования (см. 4.29, а). В противном случае разработанный
грунт будет задерживаться в нижней части отвала, отжимая вверх большие массы
грунта и преодолевая при этом значительные сопротивления.
Для повышения качества планировочных работ и сокращения
вследствие этого числа повторных проходов бульдозеры оборудуют
автоматическими системами управления подъемом-опусканием отвала, основанным
на стабилизации заданного положения толкающих брусьев (боковых балок
универсальной рамы) относительно горизонта. При отклонении брусьев от этого
положения за счет выработанного командосигнала поток рабочей жидкости
автоматически направляется в соответствующие полости гидроцилиндров подъема
отвала. Система обеспечивает точность планирования ±5 см при скорости передвижения бульдозера до 3 км/ч.
Скреперы. Скрепером называют земле-ройно-транспортную
машину с ковшовым рабочим органом, предназначенную для послойной разработки
грунта тяговым усилием, его транспортирования и отсыпки в земляные
сооружения. Скреперы применяют в промышленном, гидротехническом, дорожном
строительстве для разработки грунтов немерзлого состояния на горизонтах выше
уровня грунтовых вод при возведении насыпей, дамб, разработке выемок, на
вскрышных работах и т. п. Переувлажненные суглинки, лёссовые грунты, чернозем
и почвы с примесью гравия и гальки разрабатываются скреперами без
предварительной подготовки, а те же грунты, но высохшие и отвердевшие, а
также глины, солончаки и дресва требуют предварительного рыхления перед
их разработкой. Эффективная дальность возки грунта зависит от типа тягача п
составляет для скреперов с гусеничными тягачами 100…800 м, а для скреперов,
агрегатируемых с колесными тягачами,—300…3000 м и более.
Рабочим органом скрепера служит ковш 4 ( 4.32; а),
ограниченный днищем, боковыми и задней стенками и оснащенный ножами /.
Спереди ковш закрыт заслонкой 8, соединенной с ним шарнир-но- Задней частью
ковш опирается на ось задних колес 6″, а в передней части он соединен
упряжными шарнирами 3 с боковыми балками 2 тяговой рамы, относительно которой
он может изменять свое положение в вертикальной плоскости. Тяговая рама своей
передней балкой 10, чаще всего изогнутой в вертикальной
плоскости, соединена с тягачом 12 непосредственно ( 4.32,
в, в) или через тележку 13 ( 4.32, г). Опорой тяговой рамы служит
универсальный шарнир // (см. 4.32, а), позволяющий прицепной части
поворачиваться относительно тягача или тележки в любых направлениях.
Скреперы, выполненные по схемам 4.32, б, в, называют полуприцепными
одноосными, а по схеме 4.32, г — прицепными двухосными. По прицепной схеме
соединяют с тягачами также одноосные скреперы, у которых ось колес
расположена над центром масс груженого ковша I 4.32, д). В качестве тягача
прицепного скрепера обычно применяют трактор, чаше всего гусеничный, а
полупрн-цепные скреперы агрегатируют с двухосными (см. 4.32, б) или
одноосными ( 4.32, в) тягачами. Последние называют также самоходными.
Самоходные скреперы обладают высокой маневренностью и способны развивать
транспортные скорости до 45…60 км/ч. Дальнейшее увеличение скорости этих
машин нежелательно из-за вертикальных колебаний в системе тягач — скрепер.
Скреперы с двухосными тягачами не имеют этого недостатка, их скорости доходят
до 65… 70 км/ч, но по маневренности они уступают самоходным. Для управления
скрепером тягач оборудуют гидравлической насосной установкой или канатной
лебедкой, от которых движение передаемся исполнительным механизмам
(гидроцилиндрам или полиспастам). Современные скреперы оборудуют в основном
гидравлическими силовыми системами. Полиспастные системы сохранились лишь у
отдельных моделей прицепных скреперов.
Рабочий цикл скрепера состоит из последовательно
выполняемых операций копания грунта и заполнения им ковша, транспортирования
грунта в ковше к месту укладки, разгрузки ковша и возвращения машины на
исходную позицию следующего рабочего цикла. В начале копания ковш опускают на
грунт с помощью гидроцилиндров 9 (см. 4.32, а) или полиспаста, приоткрывая
гидроцилиндрами 5 или полиспастом заслонку с таким расчетом, чтобы в режиме
копания грунта при заглубленных ножах ее нижний обрез находился несколько
выше уровня поверхности земли ( 4-33, а). Перемешаясь вперед под действием
сил гяжести, а в случае гидравлического привода также принудительно с помощью
гидроцилиндров 9 (см. 4.32, а), ковш заглубляют в грунт и, регулируя в
дальнейшем теми же механизмами толщину срезаемого слоя, заполняют ковш [
4.33, б). Образующаяся в процессе копания призма грунта (призма волочения)
накапливается перед заслонкой, не препятствуя продвижению срезаемого грунта в
ковш. После заполнении ковша его поднимают в транспортное положение гак,
чтобы между режущей кромкой ножей и поверхностью земли бы;) достаточный для
транспортирования зазор — клиренс, закрывают ковш заслонкой и перемещаются на
транспортной скорости к месту укладки грунта ( 4.33, в), где его разгружают
по одной из приведенных ниже схем, затем ковш снова переводят в транспортное
положение и возвращают машину на исходную ПОЗИЦИЮ следующего рабочего цикла.
На 4.34 приведены схемы разгрузки ковшей скреперов.
Свободную (самосвальную) разгрузку опрокидыванием ковша вперед при открытой
заслонке ( 4.34, а) применяют на прицепных скреперах с ковшами малой
вместимости (до 4 ма). На прицепных одноосных скреперах средней вместимости
(4…6 м’:), работающих на отсыпке насыпей «с головы», а также на обратной
засыпке ям. траншей применяют свободную разгрузку с опрокидыванием ковша назад
( 4.34, б). В УХОМ случае ковш дополнительно оборудуют задней заслонкой.
Недостатком этих схем является неполная разгрузка ковшей из-за налипания
грунта на их внутренние поверхности, в связи с чем уменьшается геометрическая
вместимость ковшей и, как следствие, снижается производительность скреперов.
На машинах с канатным управлением применяют полупринудительную разгрузку,
выполняемую поворотом днища ковша при неподвижных боковых стенках ( 4.34, в,
г). Эти схемы обеспечивают лучшее опорожнение ковшей за счет частичного
соекре-бания поворачивающимся днищем налипшего на боковые стенки грунта.
Современные полутгрицепные скреперы оборудуют
устройствами для принудительной разгрузки ( 4.34, д) путем вытеснения
грунта из ковша перемещающейся вперед с помощью гидроцилиндров задней стенкой
7 (см. 4.32, а). В конце рабочего хода задняя стенка своими кромками
полностью очищает боковые стенки и днище ковша от налипшего грунта. При
разгрузке грунта в направлении движения машины ( 4.34, а … д)
обеспечивается отсыпка грунта слоем равномерной толщины, регулируемой
просветом под ножами установленного в положение разгрузки ковша. Для
повышения качества планировочных работ при отсыпке грунта и разработке выемок
современные скреперы оборудуют автоматическими системами управления,
основанными на стабилизации положения рамы ковша относительно горизонта,
которое обеспечивается гидроцилиндрами подъема — опускания ковша. Точность
планировочных работ на уклонах до 9 % в каждую сторону составляет 0,3 %.
Производительность скрепера может быть повышена за счет
лучшего наполнения ковша (т. е. увеличения ки или высоты грунта в ковше И) и
сокращения продолжительности рабочего цикла машины. Как следует из анализа
составляющих силы сопротивления передвижению скрепера, высота грунта в ковше
в конце копания ограничена тягово-сцепными свойствами машины. При разработке
толстыми стружками переувлаженных суглинков, лёссовых грунтов, черноземов и
приравниваемых к ним почв скреперные ковши наполняются «с шапкой.» (/гч=
1,1…1,25).
С повышением прочности грунтов степень наполнения ковшей
снижается из-за необходимости снимать грунт тонкими стружками. Вследствие
этого в последней фазе заполнения ковша подпорного усилия оказывается
недостаточно для преодоления возрастающих сил внутреннего трения в грунте. В
частности, при разработке сухих сыпучих песков с высоким коэффициентом
внутреннего трения ковш удается заполнить лишь на 60…70 % его
геометрической вместимости. Увеличения степени наполнения можно достигнуть за
счет применения фигурных ступенчатых или полукруглых ножей ( 4.36, 6, в) в
сочетании с разработкой грунтов по схеме рационального продольного профиля
выемки. При постепенном выглублении ковша и в связи с уменьшением толщины
стружки последняя остается в средней части ножа еще достаточной для того,
чтобы обеспечить продвижение грунта в ковш.
Более эффективные результаты дает применение
тракторов-толкачей, оборудованных буферными устройствами. При копании толкач
заходит сзади скрепера и, упираясь в его буфер, сообщает ему дополнительное
пикающее усилие, что позволяет разрабатывать грунт более толстыми стружками,
обеспечивая удовлетворительное наполнение ковша при сокращении
продолжительности операции копания, а следовательно, и всего рабочего цикла.
Тракторы-толкачи целесообразно применять при групповой работе скреперов для
их поочередного обслуживания в зоне загрузки. Толкачи используют также для
подталкивания скреперов при движении в гору. При недостаточной мощности
тракторов-толкачей они работают тандемно по два-три в одной сцепке.
Обычно тяговое усилие скрепера ограничивается условиями
сцепления его ходовых устройств с грунтом и находится в прямой
зависимости от вертикальной нагрузки, действующей на приводную часть этих
устройств. В конструкциях самоходных полуприцепных скреперов с ведущими
передними колесами последние воспринимают только часть весовой нагрузки скрепера
и грунта в его ковше. Значительная часть этой нагрузки приходится на задние
неприводные колеса. Для повышения тяговой способности этих машин некоторые
модели оборудуют дополнительным двигателем для привода задних колес. Мощность
этого двигателя обычно не превышает 75 % мощности основного двигателя.
Существенного уменьшения сопротивления при копании достигают установкой в
передней части ковша наклонного скребкового элеватора 14 (см. 4.32, (?),
обеспечивающего принудительную загрузку грунта в ковш. Недостатками скреперов
с дополнительным двигателем и элеваторной загрузкой являются увеличение массы
машин и использование дополнительных устройств только в течение операции
копания. Поэтому их выгодно применять при небольших (до 500…600 м)
дальностях возки, а также при небольших темпах работ, когда содержание
трактора-толкача ввиду больших простоев становится малоэффективным.
Некоторые самоходные скреперы со все-мн ведущими колесами
могут работать по два-три в одной сцепке, загружаясь поочередно, с последующим
раздельным перемещением к месту отсыпки грунта и обратно. Выигрыш
производительности в этом случае достигается за счет удвоенного или
утроенного объема грунта при увеличении продолжительности рабочего цикла лишь
на время заполнения соответственно одного или двух скреперов. Недостатками
являются высокая стоимость и значительная масса полуавтоматических сцепных
устройств.
Грейдеры. Грейдеры относят к земле-ройно-транспортным
машинам с отвальным рабочим органом. Они предназначены для послойной
разработки грунтов немерзлого состояния на горизонтах выше уровня грунтовых
вод. Их применяют для планировочных и профилировочных работ в дорожном,
аэродромном строительстве, в других его отраслях для возведения насыпей
высотой до 1 м из боковых резервов, постройки грунтовых дорог с боковыми
канавами, сооружения дорожного корыта и распределения в нем материалов
основания дорожной одежды, профилирования дорожных обочин, сооружения и
очистки оросительных и придорожных канав, зачистки и планировки откосов,
насыпей и выемок, очистки дорог и площадей от снега, льда и т. п. Грейдеры
выполняют как самоходные машины с собственным двигателем и приводным ходовым
устройством (автогрейдеры) ( 4.37, и). Реже применяют прицепные грейдеры,
буксируемые тракторами. Ходовая часть автогрейдера состоит из четырех
приводных задних пневмоколес / и двух приводных или непрпводных управляемых
передних колес 11. Задние колеса с каждой стороны машины попарно объединены
балансирными балками 2, шарнирно соединенными с подрамником 3, продолжением
которого служит основная рама 4, называемая также хребтовой балкой. Последняя
опирается на ось передних колес. Это соединение выполнено в виде
цилиндрического шарнира, позволяющего оси совершать поперечные угловые
(баланси-рные) перемещения. Такая подвеска передних и задних колес
обеспечивает ОЕШ-рание машины на все шесть колес независимо от рельефа
местности. Для изменепия направления движения передние колеса могут
поворачиваться в плане с помощью рулевой гралеций автомобильного типа. Для
повышения устойчивости движения при работе с коеоуетановлен-ным отвалом эти
колеса могут также отклоняться в боковом направлении ( 4.37, б).
Рабочий оргий — отвал 7 ( 4.37, а, в} через кронштейны 5 и
поворотный круг 8 закрепляют на тяговой раме 9. Последнюю располагают под
хребтовой балдой и соединяют с ней в передней
части универсальным шарниром 10, а в задней — с оомощыо
гидравлических цилиндров 14 и 15 подвешивают к хребтовой балке. Два
гидравлических цилиндра 14, работающих независимо один от другого,
обеспечивают подъем передней части тяговой рамы и ее перекос, а гндроци-линдр
15— ее вынос в сторону от продольной оси грейдера. Вращением новоротного
круга 8 с жестко закрепленными на нем кронштейнами 5 обеспечивается установка
отвала в плане. Благодаря такой подвеске отвал может быть установлен
горизонтально или наклонно в вертикальной плоскости, под любым углом наклона
в плане, располагаться в полосе колеи машины или быть вынесенным за ее
пределы, быть оиушеиым ниже уровня поверхности, по которой перемешается
машина, или поднятым над ней. Этим обеспечивается высокая маневренность рабо-
чего органа автогреидера при выполнении перечисленных выше
работ.
В случае необходимости работы на больших вылетах от
продольной осп машины, например при планировке откосов боковых канав, отвал
переставляют на кронштейнах, располагая его асимметрично продольной оси
тяговой рамы. Угол резани» отвала регулируют установочными гребенками 6,
закрепляя их винтами в требуемых положениях. На автогрейдеры навешивают также
вспомогательное оборудование 12 бульдозера или киркошци-ка, располагая
последний перед передними колесами или за ними, под хребтовой балкой.
Кнрковщикн, в частности, используют для разрушения твердых покрытий дорог при
их ремонте. Управляют отвалом бульдозера или кирковщиком посредством
гидроцилиндра 13. Для зачнетных работ на ломаных в поперечном направлении
поверхностях отвалы дополнительно оборудуют откосниками 16 ( 4.37, г…е).
Управление рабочими движениями обеспечивается гидравлическими системами.
В процессе работы грейдера управление им сводится к выбору
соответствующих скоростных режимов движения машины, выдерживанию заданного
направления движения и регулированию положения отвала по высоте и его
перекосов. Все остальные перемещения рабочего органа являются установочными и
выполняются обычно до начала рабочего процесса. Качество планировочных и
профилировочных работ в значительной мере зависит от опыта машиниста по
управлению высотным положением отвала и его перекосом в поперечном
направлении. В конструкциях современных автогрейдеров для этих целей
применяют автоматические системы управления, выполняемые в двух вариантах. По
первому варианту правым но ходу движения машины гидроцилиндром подъема —
опускания тяговой рамы управляет машинист, а второй, левый гидроцилиндр,
управляемый автоматически, обеспечивает заданный поперечный наклон отвала.
Система автоматической стабилизации поперечных уклонов обеспечивает
профилирование боковых уклонов земляного полотна, планирование откосов
насыпей и выемок и копание кюветов с уклонами откосов к горизонту до 55 г’. При скорости
движения машины до 3,6 км/ч точность профилирования уклонов составляет ±1%.
По второму варианту к первой схеме добавляется
автоматическая система выдерживания продольного уклона по установленной рядом
с полосой движения машины реперной канатной направляющей, которая управляет
правым гидроцилиндром подъема тяговой рамы. Точность планирования продольных
уклонов составляет ± 6 мм при рабочей скорости до 0,9 км/ч. и до ±10 мм при скорости до 3,6 км/ч, а поперечных уклонов соответственно ± (1.2 и ± (1,5
%. За счет повышения точности обработки поверхностей при использовании
автоматической системы стабилизации продольных и поперечных уклонов
повышается качество работ, число проходов автогрейдера сокращается примерно в
два раза, снижается утомляемость машиниста.
Рабочий процесс грейдера сходен с работой бульдозера,
оборудованного поворотным в плане отвалом. При выполнении профилировочных
работ для лучшего внедрения в грунт отвала широко пользуются его перекосом,
вырезая стружки треугольного поперечного сечения. Таким способом сооружают,
например, грунтовые дороги, вырезая грунт из придорожных канав и перемешая
его в насыпь дороги, профилируют корыто дорога в подготовленном земляном
полотне и т. п. Грейдеры эффективно применять при длине рабочих участков
(захваток) более 500 м. Ни коротких захватках увеличивается количество разворотов
машины и перестановок рабочего органа, в результате чего производительность
грейдеров снижается. Полноповоротная система отвала автогрейдера и
дистанционное управление всеми его рабочими перемещениями обеспечивают работу
на коротких захватках челночным способом, который менее удобен по управлению
при движении .машины задним ходом, но в некоторых случаях может оказаться
более экономичным по сравнению с обычным способом с разворотами па границах
захваток. При возведении насыпей из боковых резервов грейдеры эффективно
применять при дальности перемещения грунта до 30 м.
Грейдер-элеваторы. Грейдер-элеваторы предназначены
дли копания немерзлых грунтов в материковом залегании на горизонтах выше
уровня грунтовых вод и отсыпки его в насыпи, отвалы или в транспортные
средства. Их используют для возведения насыпей из боковых резервов,
образования продольных выемок, устройства каналов в полувыемках-полунасыпях и
других подобных сооружений.
Грейдер-элеваторы выполняют как полуприцепные
машины-орудия, агрегатиру-емые с тракторами (гусеничными или колесными) или
одноосными тягачами. Реже их выполняют как сменное навесное оборудование на
автогрейдере. У полуприцеп-ных грейдер-элеваторов основная ра.ма / ( 4.38)
опирается на два пневмоколеса 10. У машин с большим вылетом отвального конвейера
одно из колес — левое — в транспортном положении устанавливают симметрично
со вторым колесом относительно продольной оси машины, а в рабочем положении
для повышения устойчивости его отодвигают, устанавливая на специальной
откидной оси. Передней частью основная рама соединена с тягачом по схеме
универсального шарнира сцепным устройством 6. Рабочий орган в виде дискового
плуга 8 подвешен на кронштейне 9 к плужной балке 7. Он ориентирован так, что
при движении машины вперед вырезает из грунта стружку с поперечным сечением в
форме эллиптического сегмента. Отделенный от массива грунт, поднявшись по
внутренней сферической поверхности плуга, отваливается на ленточный конвейер
,5, расположенный поперек основной рамы, которым он отсыпается в насыпь,
отвал или транспортное средство. В зависимости от прочности разрабатываемых
грунтов глубину стружки регулируют подъемом-опусканием плужной рамы с помощью
гидроцилиндра 3. Угол наклона ленточного конвейера и, следовательно, высоту
подъема грунта для разгрузки регулируют гидроцилиндром 4. Для перемещения
грунта на большие расстояния ленточный конвейер наращивают вставками.
Гидравлические цилиндры питаются рабочей жидкостью от насосной установки,
расположенной на тягаче или на грейдер-элеваторе. В первом случае она приводится
в движение от двигателя тягача, а во втором — от собственного двигателя 2,
управляемого дистанционно из кабины машиниста тягача.
Рабочий процесс грейдер-элеватора состоит из
последовательных проходов машины по отрабатываемому участку с разворотами в
конце последнего. Для снижения непроизводительных затрат времени на
поворотные движения грейдер-элеваторы целесообразно применять на участках
протяженностью 200…500 м и более. Некоторые модели грейдер-элеваторов
позволяют работать челночным способом после установки рабочего органа в
требуемое положение на концах участка.
Зеркально-теневой метод. способы реализации зтм. предельная и условная чуствительность
11.06.2004.
. Лнкция 1.
Тема: ЗТМ.
Метод –это правило использования
средств контроля по признаку характер взаимодействия поля с объектом контроля.
ЗТМ относят к комбинированным методам:
—
мы анализируем прошедшую сквозь толщину объекта
волну (методы прохождения)
—
анализируем отраженную от донной поверхности
(методы отражения).
Признак обнаружения дефекта –изменение амплитуды
донного сигнала в заданное наперед число раз.
Вне зависимости от
способа реализации ЗТМ существуют требования к объекту контроля:
—
плоскопараллельность поверхности (катания, донной)
—
наличие акустического контакта.
Способы
реализации ЗТМ.
1). По первому донному продольными волнами. Анализируется амплитуда донного сигнала прошедшего и отраженного один
раз сквозь изделие. Реализуется с помощью ПЭП, работающего в совмещенном (a=0) или
раздельно-совмещенном (РС a=0) режиме.
2). По второму донному
продольными волнами. Исследуется амплитуда второго
донного сигнала ( 2 раза прошедшего сквозь изделие). Реализуется теми же ПЭП.
9). Наклонный ввод
продольными волнами. Используется 2 наклонных ПЭП с b<b![]() ,
,
расположенными на расстоянии В: ![]() =tg
=tg
a. В=tg a*Н*2. Анализируется амплитуда сигнала,
пришедшего на ПЭП, работающего в режиме приема.
10). Наклонный ПЭП поперечными волнами b![]() <b<b
<b<b![]()
Способы | Преимущества | Недостатки |
1 | -простота реализации -контроль за качеством акуст. контакта -возможность выявления вертикальных расслоений с малым раскрытием | -невозможно определить глубину залегания дефекта -высокие требования к качеству акустич |
2 | -простота реализации -лучшая чувствительность к дефектам (сигнал через дефект проходит 2 раза) -возможность выявления вертикальных расслоений с малым раскрытием | -невозможно определить глубину залегания дефекта -высокие требования к качеству акустич контакта |
9 | -осуществляется контроль за акуст контактом .при этом стояниеотражающей поверхности менее критично для его обеспечения -возможность определения глубины залегания дефекта -возможность выявления вертикальных расслоений с малым раскрытием | -менее чувствителен к дефектам, чем 1 и 2 -высокие требования к плоскопараллельности поверхности. |
10 | -осуществляется контроль за акуст контактом .при этом стояниеотражающей поверхности менее критично для его обеспечения -возможность определения глубины залегания дефекта | -менее чувствителен к дефектам, чем 1 и 2 -высокие требования к плоскопараллельности поверхности -нет возможности выявления вертикальных расслоений |
Так же существуют следующие
способы реализации ЗТМ.
—
по 1 и 2 донному поперечными волнами (рис.4,5),
ЭМАП
—
по соотношению 1 и 2 донных для продольных и
поперечных волн.(рис 3,6)
—
использование волн дифракции (рис 7.8)
—
использование трансформации волн при наклонном
вводе колебании (рис.11.12)
Измеряемые
характеристики.
Коэффициент выявляемости
По первому донному.
Вводим коэффициент ослабления К![]() =
=![]()
Чем больше дефект,
тем меньше К![]() . если К
. если К![]() =1 то либо
=1 то либо
дефекта нет либо дефект не перекрывает пучок.
К![]() =0, дефект
=0, дефект
перекрыл луч полностью.
К![]() =
=![]() =N
=N![]() -N
-N![]() ;
;
По второму донному. Это отношение
амплитуды второго донного по отношению ко второму донному на бездефектном
участке:
К![]() =
=![]()
Таким образом: К![]() =К
=К![]() =N
=N![]() -N
-N![]()
Условная протяженность –это расстояние
между двумя крайними положениями преобразователя, при которых донныйсигнал в 2
раза выше (на 6 дБ), чем максимально ослабленный дефектом донный сигнал.
-находим положение ПЭП, при
котором дефект максимально ослабляет сигнал
-доводим сигналдо стандартного (порогового) уровня
-уменьшаем этот сигнал на 6 дБ
-находим крайнее положение, при которым сигнол достигает стандартного
уровня.
Предельная и условная чуствительность.
Для ЗТМ предельная чувствительность
определяется минимальным ослаблением, при котором еще определяется дефект
Для первого донного равна условной чувствительности: К![]() =К
=К![]() ;
;
Для второго донного: К![]() =
=![]()
К![]() =
=![]() =0,2.
=0,2.
Для рельсовой дефектоскопии для ЗТМ принята стандартная условная
чувствительность- 14 дБ.
При ЗТМ для настройки вместо СО используется рельс.
Помехи при ЗТМ.
1). Ослабление акустического
сигнала: К![]() =
=![]() =0,3 –0,7: 2). Структурные шумы К
=0,3 –0,7: 2). Структурные шумы К![]() =
=![]()
3). Непараллельность поверхностей К![]() =
=![]() 4). Нарушение донной поверхности К
4). Нарушение донной поверхности К![]() =
=![]()
5). Смещение искат системы отн оси
рельса К![]() =
=![]() 6).Локальное изменение толщ изделия
6).Локальное изменение толщ изделия
К![]() =
=![]()
7). Разворот одного из накл преобразов К![]() =
=![]()
Суммарная помеха в разах перемножается К![]() = К
= К![]() *К
*К![]() *К
*К![]() *…..
*…..
а в дБ суммируется К![]() = К
= К![]() К
К![]() К
К![]() …..
…..